硬件介绍
AlphaBot 2 是智平方通用智能机器人 AlphaBot(爱宝)系列的一款轮式双臂人型机器人,搭载了智平方全面升级的具身大模型 Alpha Brain。它具备卓越的空间智能和强大的学习能力,可以向人类一样快速适应新环境,灵活执行多种任务。
整机结构与参数
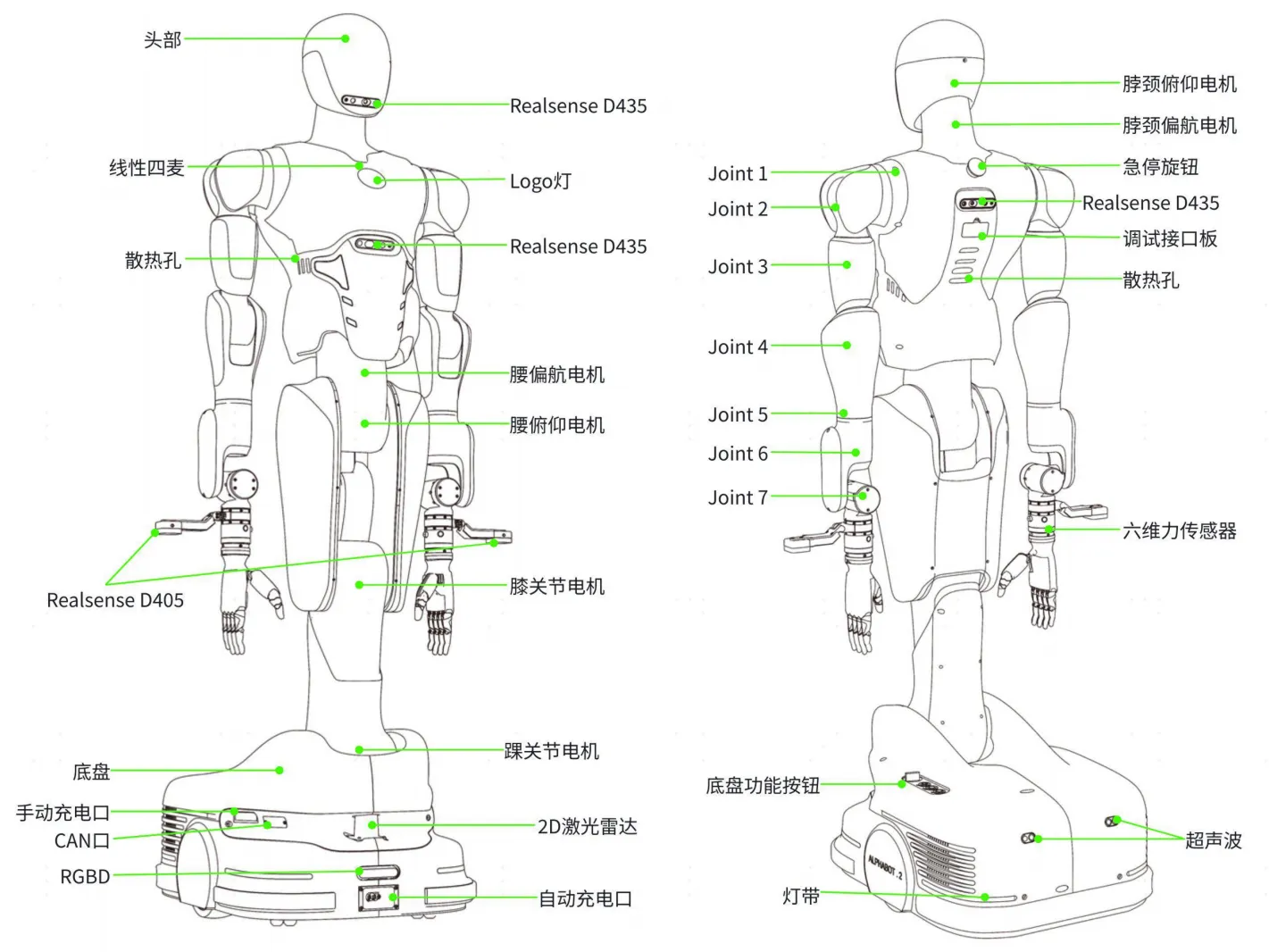
Section titled “整机结构与参数”AlphaBot 2 整机拥有 22 个自由度(不含末端执行器),腿部采用三关节折叠升降结构并配备腰部偏航,单条机械臂具备 7 个自由度,脖颈支持俯仰和偏航 2 个自由度,底盘为两轮差速驱动。
| 参数类别 | 参数名称 | 参数说明 |
|---|---|---|
基础参数 | 身高 | 1800mm |
重量 | 135kg(标品) | |
算力模组 | NVIDIA Orin AGX 64G | |
续航 | 4~6h | |
电池 | 48V 30Ah | |
全身自由度 | 22(不含末端执行器) | |
机械臂自由度 | 7(单臂) | |
单臂展 | 723mm(不含末端执行器) | |
额定负载能力 | 4kg(单臂) | |
操作空间 | 0~2.3m | |
移动速度 | 0.1m/s~1.5m/s | |
坡度 | 0°~5° | |
硬件参数 | 头、胸、背部摄像头 | Realsense D435 |
手部摄像头 | Realsense D405 | |
底盘驱动方法 | 两轮差速 | |
末端执行器 | 灵巧手/夹爪/其他工具 | |
语音模块 | MIC 阵列:线性 MIC*4 | |
屏幕 | 交互显示屏 | |
调试口 | USB3.0*1;HDMI*1;RJ45*1 | |
急停装置 | 背部急停 | |
运行环境 | 温度 | 5℃~40℃ |
湿度 | 10~80%RH |
各部件功能与参数
Section titled “各部件功能与参数”本部分将对 AlphaBot 2 的各主要硬件部件进行详细介绍。
-
AlphaBot 2 的头部、胸部和背部均配备了 Realsense D435 摄像头,提供全方位的视觉感知能力。Realsense D435 是一款 RGBD 相机,能够实时采集场景的色彩和深度信息(物体与相机的距离),为目标识别、人机协作等功能提供关键数据支撑。

参数名称 参数说明 双目基线 50mm 深度传感器技术 全局快门 深度视场角 87°×58° 最大深度分辨率 1280×720 @ 30fps Z 轴精度误差 <2%(2m 处) RGB 传感器技术 卷帘快门 最大 RGB 分辨率 1920×1080 @ 30fps RGB 视场角 69°×42° Z 轴最小距离 约等于 28cm 理想工作范围 0.3~3m 尺寸、重量 90×25×25mm、72g -
左右机械臂末端则分别配备了一个 Realsense D405 摄像头,专门用于近距离物体识别和操作。Realsense D405 通过近距离捕捉目标物体的彩色细节与空间姿态信息,为末端作业提供实时视觉引导,同时实现对作业过程的可视化监控与数据记录。

参数名称 参数说明 双目基线 18mm 深度传感器技术 全局快门 深度视场角 87°×58° 最大深度分辨率 1280×720 @ 30fps Z 轴精度误差 <2%(500mm 处) RGB 传感器技术 全局快门 最大 RGB 分辨率 1280×720 @ 30fps RGB 视场角 87°×58° Z 轴最小距离 约等于 70mm 理想工作范围 约等于 70~500mm 尺寸、重量 42×42×22mm、58g
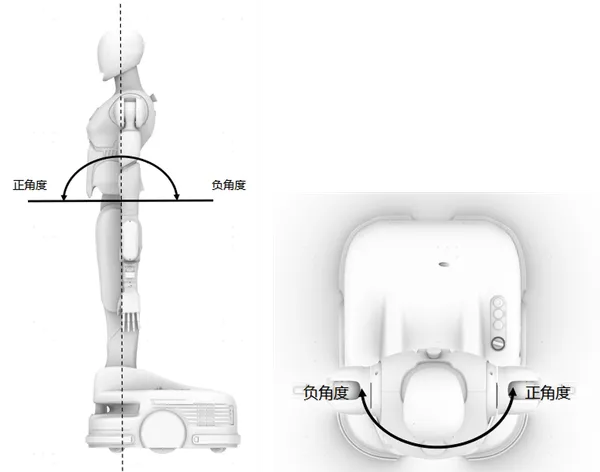
机器人零位如下图,其中躯干关节电机转动角度方向如图所示。
核心部位关节参数如下表所示。
| 所属部位 | 名称 | 运动范围 | 减速比 | 2000rpm/额定转矩 | 峰值扭矩 |
|---|---|---|---|---|---|
| 头部 | 脖颈俯仰电机 | -16°~13° | 51 | 1.8Nm | 3.3Nm |
| 脖颈偏航电机 | -90°~90° | 51 | 1.8Nm | 3.3Nm | |
| 腰部 | 腰偏航电机 | -90°~90° | 101 | 30Nm | 66Nm |
| 腰俯仰电机 | -90°~30° | 121 | 84Nm | 207Nm | |
| 腿部 | 膝关节电机 | 0°~148° | 121 | 169Nm | 436Nm |
| 踝关节电机 | -58°~0° | 121 | 169Nm | 436Nm |
AlphaBot 2 配备了双机械臂系统,每条机械臂均具备 7 个自由度,能够实现灵活的操作和多样化的任务执行。机械臂采用高精度伺服电机和关节设计,确保在各种操作环境下的稳定性和可靠性。机械臂末端执行器可以根据任务需求更换为灵巧手、夹爪或其他工具,以适应不同的操作场景。
下表为单条机械臂的主要参数。
| 参数名称 | 参数说明 |
|---|---|
| 自由度 | 7 |
| 关节范围 | J1:-178°~178° J2:-25°~178° J3:-178°~178° J4:-130°~0° J5:-178°~178° J6:-70°~70° J7:-26°~120° |
| 有效额定负载 | 4kg |
| 工作半径 | 723mm(不含末端执行器) |
| 重复定位精度 | ±0.1mm |
| 六维力量程 | 200N/7Nm |
| 供电电压 | DC 20~30V |
| 供电电流 | 20A |
| 对外硬件接口 | 网口/RS485/CAN |
| 对外软件接口类型 | Python、C 和 C++ |
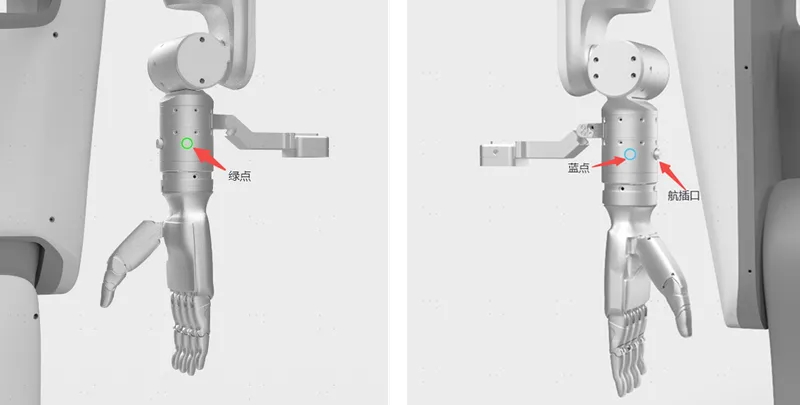
| 名称 | 功能说明 |
|---|---|
| 绿色按钮 | 拖拽示教,长按进入拖拽示教模式。 |
| 蓝色按钮 | 复现/归零,点按复现拖拽示教轨迹,长按恢复零位。 |
| 航插口 | 连接末端执行器,如夹爪、灵巧手、吸盘等。 |
航插口各引脚定义如下表所示。
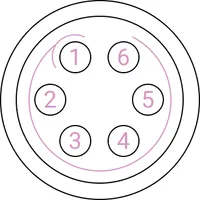
| 引脚编号 | 接线颜色 | 说明 |
|---|---|---|
| 1 | 黄 | RS485_A |
| 2 | 白 | RS485_B |
| 3 | 红 | 数字接口 1(DI1/DO1) |
| 4 | 黑 | 数字接口 2(DI2/DO2) |
| 5 | 绿 | 电源 GND |
| 6 | 蓝 | 电源输出:0V/5V/12V/24V,可进行程序控制 |
底盘采用两轮差速驱动,能够实现灵活的移动和转向。差速驱动系统通过独立控制左右轮的速度,实现机器人在平面上的前进、后退和原地转向等多种运动方式,适应复杂环境下的导航需求。
下表为底盘的主要参数。
| 参数名称 | 参数说明 |
|---|---|
| 驱动方式 | 两轮差速 |
| 全局定位精度 | ±5cm |
| 宽度 | 505mm |
| 长度 | 650mm |
| 负载 | ≤100kg |
| 速度 | 0.1m/s~1.5m/s |
| 自动回充 | 支持自动回充 |
| 电池容量 | 48V 30Ah |
| 激光雷达 | 2D 激光雷达,测量距离可达 25m |
| RGBD 摄像头 | 1 |
| 调试口 | RJ45、USB、HDMI |
| 软件接口 | API |
-
底盘按钮或旋钮。

名称 功能说明 自动 用于机器人自主运动的工作模式。此模式下可向机器人发送任务或任务组,机器人将自动完成已编辑好的组合指令。该模式下底盘状态灯为白色。 手动 用于手动控制机器人运动的工作模式。此模式下可推动机器人,且底盘状态灯呈黄色。 维护 该模式下整机运动模块的电源被切断,无法控制机器人与集成机构运动,且底盘状态灯呈红色。 开关 长按 1.5s,机器人上电或下电。 暂停/继续 当发生异常状况时,按下 暂停/继续按钮,机器人将暂停当前任务,底盘状态灯呈白色拖尾流水状。在已连接局域网 Wi-Fi 情况下,长按此按钮,机器人将语音播报当前 IP 地址。复位 短按此按钮,将机器人复位至上一时刻记录的坐标点。长按此按钮,将机器人复位至预设的初始复位点。 组合按钮 同时长按 暂停/继续和复位按钮 5 秒,即可开启机器人热点(可供底盘上位机软件连接),并伴有语音提示。 -
底盘外部接口。
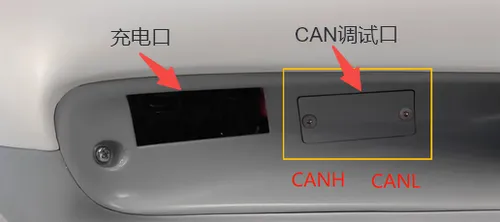 名称
名称功能说明 充电接口 连接电源适配器,为机器人充电。 CAN 调试接口 当电机出现异常需检修时,卸下 CAN 接口外板,通过 CAN 线和 CAN 盒子查看并调节关节电机状态参数。
AlphaBot 2 搭载了 NVIDIA AGX Orin 64G 作为算力模组,提供强大的计算能力以支持机器人在复杂环境下的智能决策和任务执行。
| 名称 | 说明 |
|---|---|
| 核心控制板 | NVIDIA AGX Orin 64GB |
| 操作系统 | Ubuntu 22.04 LTS |
AlphaBot 2 的后背部分集成了外部接口和急停装置。
-
外部接口:用于拓展外部设备,取下盖板即可看到接口。
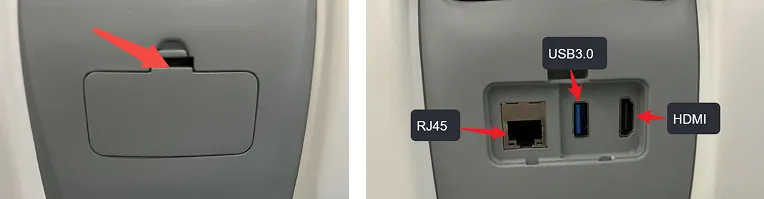
名称 数量 功能说明 HDMI 接口 1 用于连接显示器或其他视频输出设备,方便进行调试和监控。 USB3.0 接口 1 用于连接外部设备,如摄像头、传感器等,支持高速数据传输。 RJ45 接口 1 用于通过网线直接与机器人本体控制器通信。 -
急停装置:按下急停按钮后,底盘制动,且机械臂停止动作,顺时针旋转后解除急停。

AlphaBot 2 配备了专用的电源适配器,用于为机器人提供稳定的电力供应,确保其在各种操作环境下的持续运行。
-
电源适配器参数说明。

参数名称 参数说明 主体尺寸 235×120×70mm 自重 3.5kg 输入端线缆长度 1500mm 输出端线缆长度 1000mm 输入 200~240V,50~60HZ 输出 29.4±0.2V,20A±3%,700W -
指示灯状态说明。

LED 灯 颜色 状态 LED1 红色 已启动 LED2 红色 充电中 绿色 已充满
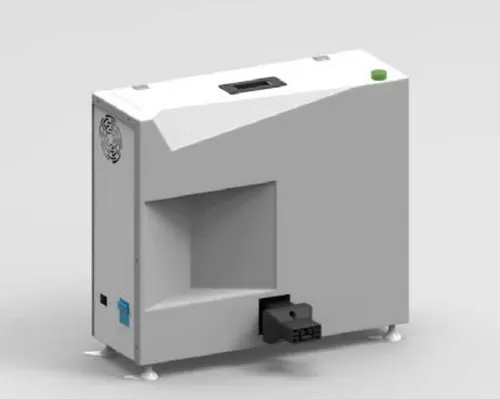
AlphaBot 2 配备了专用的充电箱,用于为机器人提供安全、便捷的充电解决方案,确保其在各种操作环境下的持续运行。
| 参数名称 | 参数说明 |
|---|---|
| 尺寸 | 180×530×460mm |
| 输入制式 | 单相三线制(L/N/PE) |
| 输入电压 | 220V |
| 频率 | 45Hz~65Hz |
| 最大输入电流 | ≤18A(根据实际功率) |
| 输入功率因数 | ≥0.99(满载) |
| 输出电压 | 48V |
| 输出电流 | 0~50A |
| 稳压精度 | ≤±0.6% |
| 衡量杂音电压 | <2mV |
| 峰-峰值杂音电压 | ≤150mV(20MHz 带宽) |
| 效率 | ≥90%(额定输入满载情况下) |
| 工作温度 | -20℃~65℃,推荐 15℃~25℃ |
| 存储温度 | -40℃~70℃ |
| 相对湿度 | 10%~90%,推荐 40%~60% |
| 大气压 | 70kPa~106kPa |
| 场地要求 | 周围无严重尘土、爆炸危险介质、腐蚀金属和破坏绝缘的有害气体、导电微粒和严重的霉菌、无强电磁场干扰 |