常用操作
在使用 AlphaBot 2 机器人时,掌握以下操作将有助于您更高效地使用和操作机器人。
-
在底盘处,长按
开关键 1.5s,机器人上电,按钮全亮代表上电成功。
-
在等待 1 分钟后,机械臂末端的蓝/绿按钮点亮,代表机械臂上电成功,随后便可开始使用机器人。
在底盘处,长按 开关 键 1.5s,机器人下电,按钮全灭代表下电成功。
若机器人发生或可能发生危险或异常时,请立即按下后背急停按钮,机器人将立即停止并进入安全停机状态,具体操作如下。
-
用力按下后背红色按钮,听到“咔哒”声,表示触发急停。

-
确认机器人是否完全静止,本体及末端执行器无任何运动。
-
检查底盘指示灯。若红色灯闪烁,表示急停生效。
-
若需要恢复机器人使用,请顺时针旋转红色按钮,直至其弹出(听到“弹起”声)。
AlphaBot 2 内置电池电量不足时,会语音提示需要充电。AlphaBot 2 提供了如下两种充电方式,请根据具体场景选择合适的充电方式。
-
使用电源适配器充电:机器人关机或切换手动模式后,使用电源适配器直接对机器人进行手动充电。

-
使用充电箱充电:机器人自行移动到充电箱进行自充电。
在开始以下操作前,请阅读以下安全注意事项。
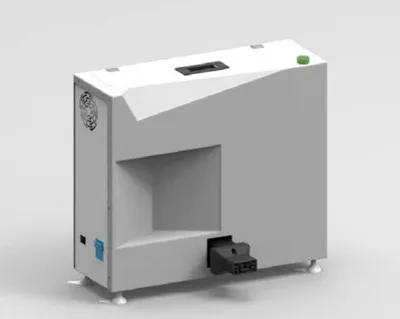
电源适配器转换充电箱
Section titled “电源适配器转换充电箱”-
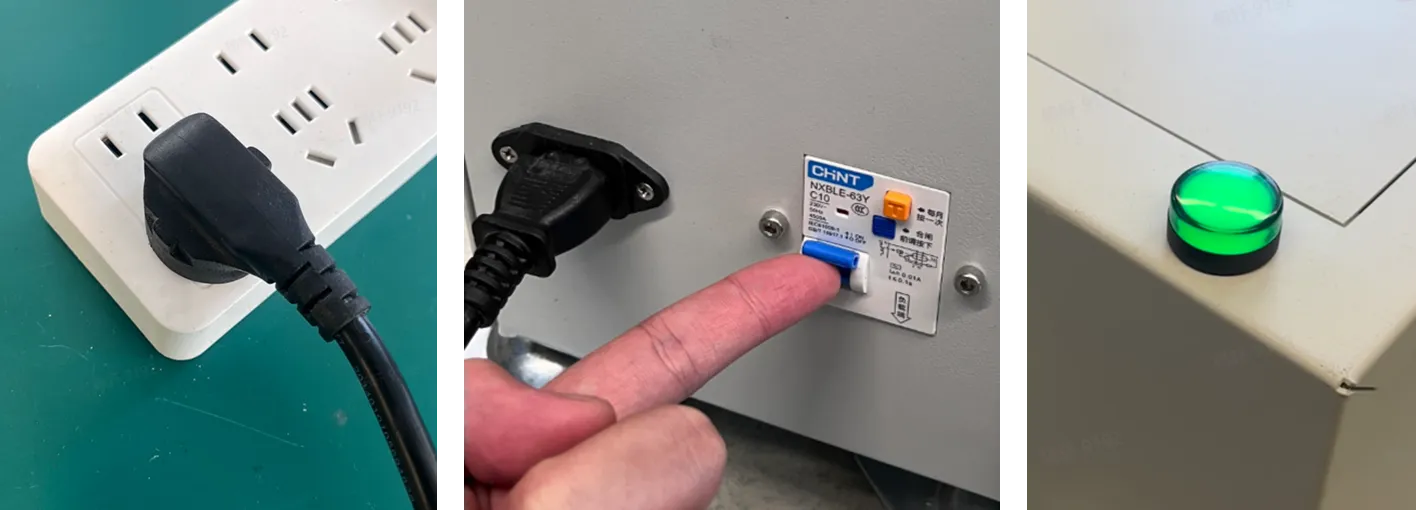
将电源适配器上不带变压器的一段电源线取下,插在充电箱的外部插口。

-
将充电箱上方的盖子打开。

-
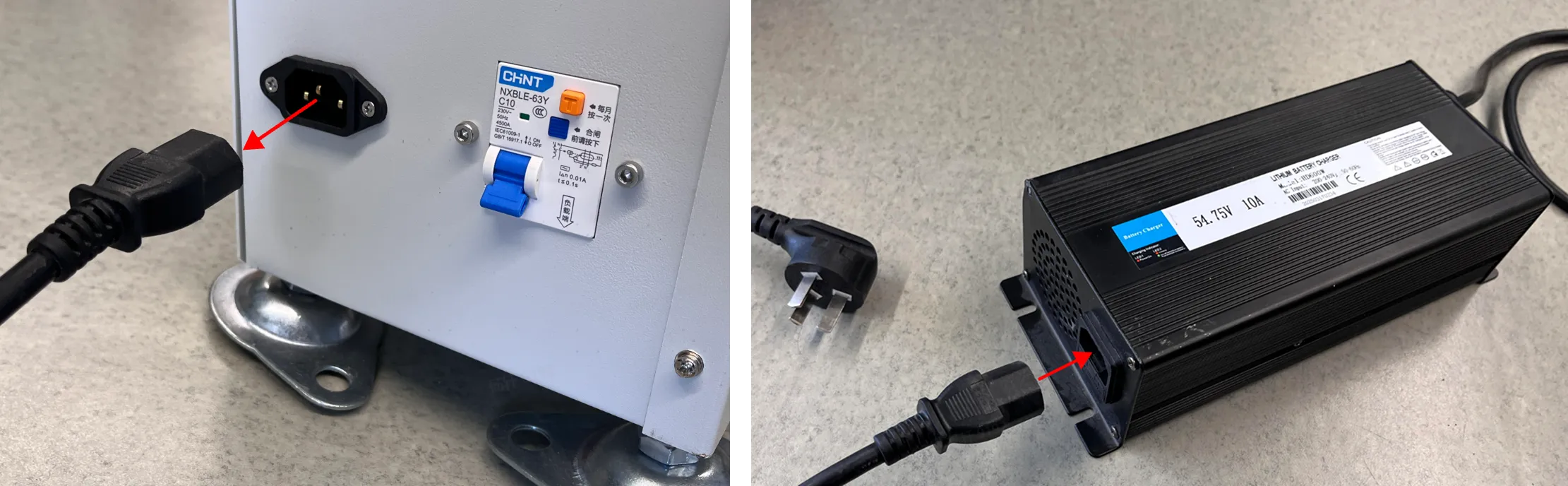
将充电箱内部的短线插在变压器上,变压器另一端的电源线插在充电箱内部的方形插槽上,完成后合上充电箱上方的盖子。
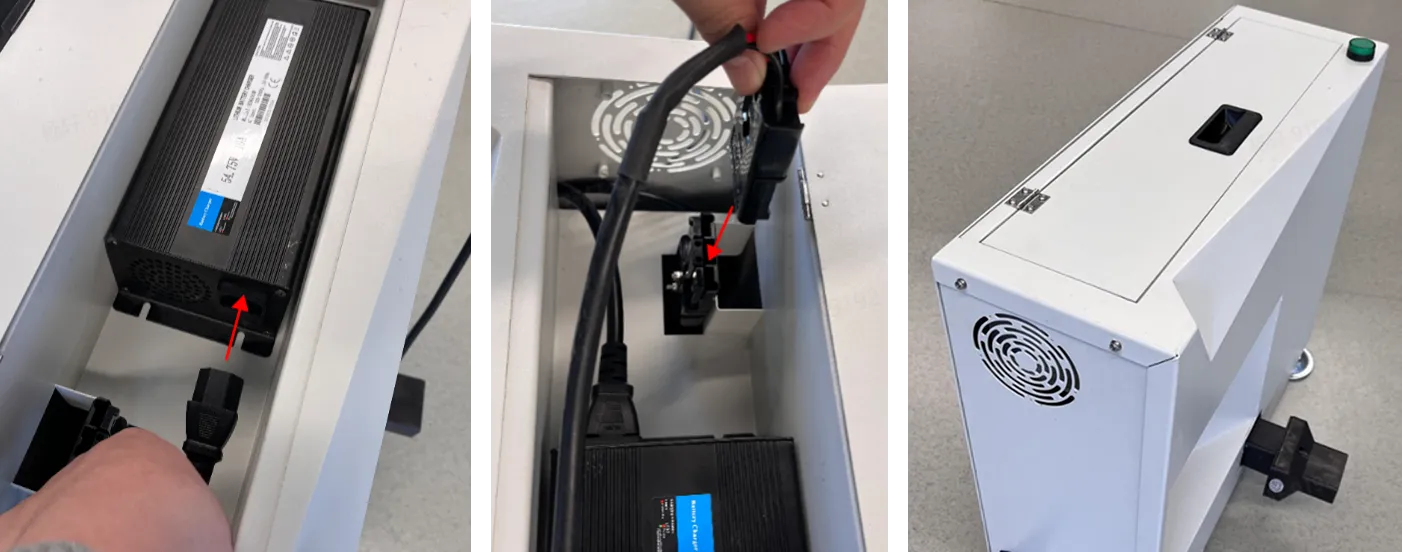
-
充电时,将外部的电源线插在插座上,把充电箱上的电闸上调到开启状态,查看信号灯状态是否正常。若信号灯显示绿色,即可正常使用充电箱。
充电箱转换电源适配器
Section titled “充电箱转换电源适配器”-
将充电箱上方的盖子打开,将充电箱内部的短线从变压器上拔下,变压器另一端的电源线从充电箱内部的方形插槽上拔下。

-
完成后取出电源适配器,合上充电箱上方的盖子。

-
将充电箱外部的电源线拔下,插在变压器上。
-
参考使用电源适配器充电部分进行充电。
使用电源适配器充电
Section titled “使用电源适配器充电”-
将机器人切换至手动模式(或长按
开关键 1.5s 断电),然后将机器人推至电源插座旁。 -
连接电源适配器:一端接电源插座,另一端接机器人底盘充电接口,务必确保两端连接牢固。
-
连接成功后,电源适配器的 LED2 指示灯显示红色,表示正在充电。

远程连接主控板
Section titled “远程连接主控板”在某些情况下(如调试),电脑需要通过 ssh 命令远程连接至主控板。主控板的信息如下表所示。
| 信息项 | 说明 |
|---|---|
| 主控模块 | NVIDIA AGX Orin 64G |
| 用户名 | robot |
| IP 地址 | 192.168.90.1 |
| Wi-Fi 名称 | 形如 Alphabot2-xxx-xxxx,具体见交付清单 |
| Wi-Fi 初始密码 | 88888888 |
接下来以 Windows 操作系统为例,详细讲解电脑如何连接主控板。
-
点击无线网,查找形如
Alphabot2-xxx-xxxx的 Wi-Fi 网络名称,然后点击连接。此处以 Alphabot2-088-5d50 为例。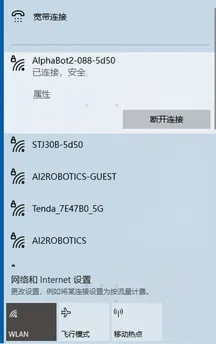
-
在搜索框中搜索
网络连接,点击查看网络连接。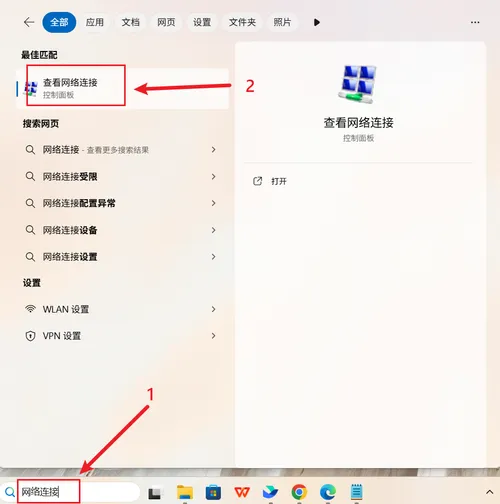
-
双击
Alphabot2-xxx-xxxx,点击详细信息,查看其 IPv4 默认网关地址。该地址即为远程登陆主控板的 IP 地址。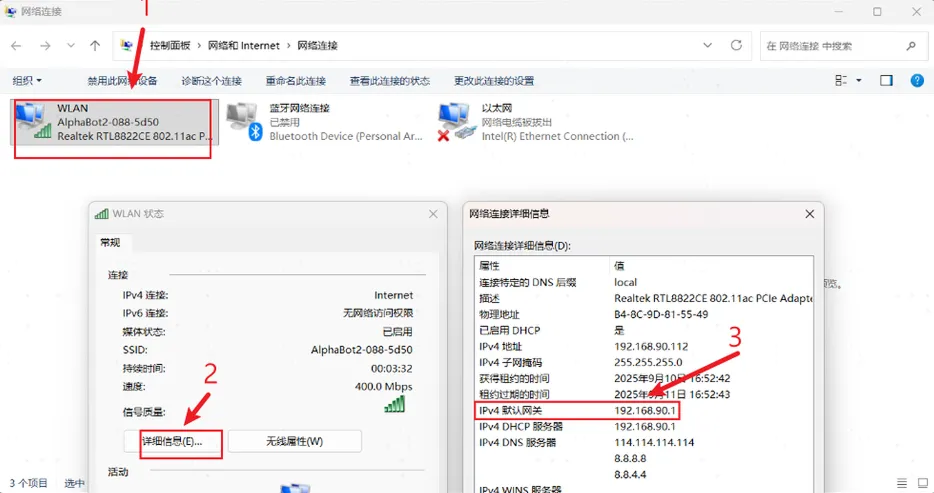
-
使用快捷键
Win+X,弹出菜单,点击终端。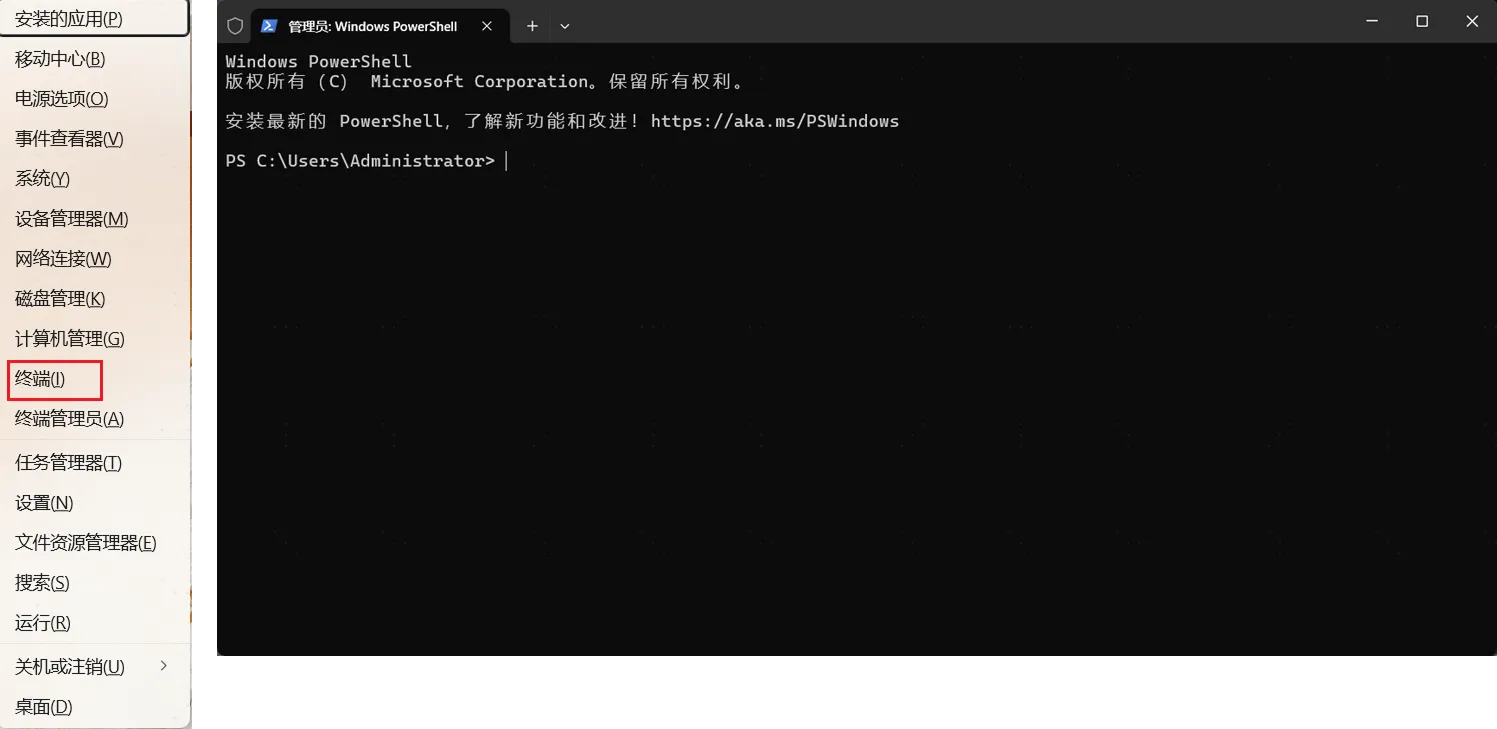
-
在终端输入
ping 192.168.90.1,显示下图则表示,可进行登录操作。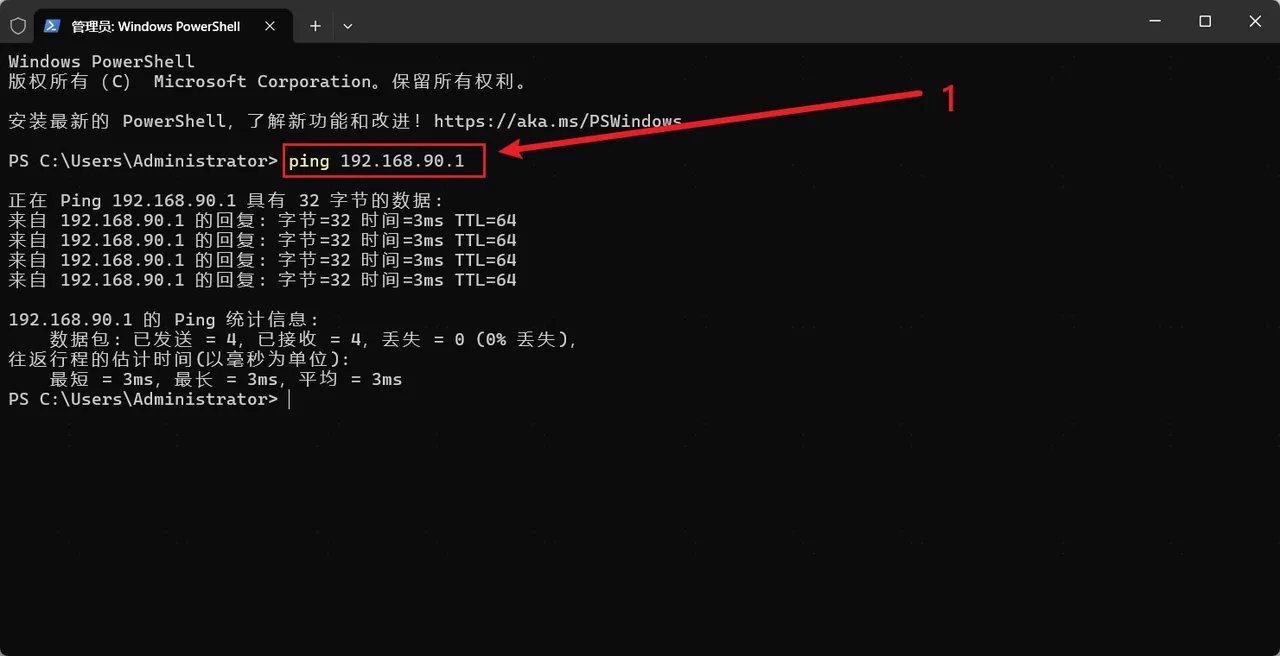
-
在终端输入
ssh robot@192.168.90.1,随后输入yes,以及登录密码(默认初始密码为88888888),显示下图则表示连接主控板成功。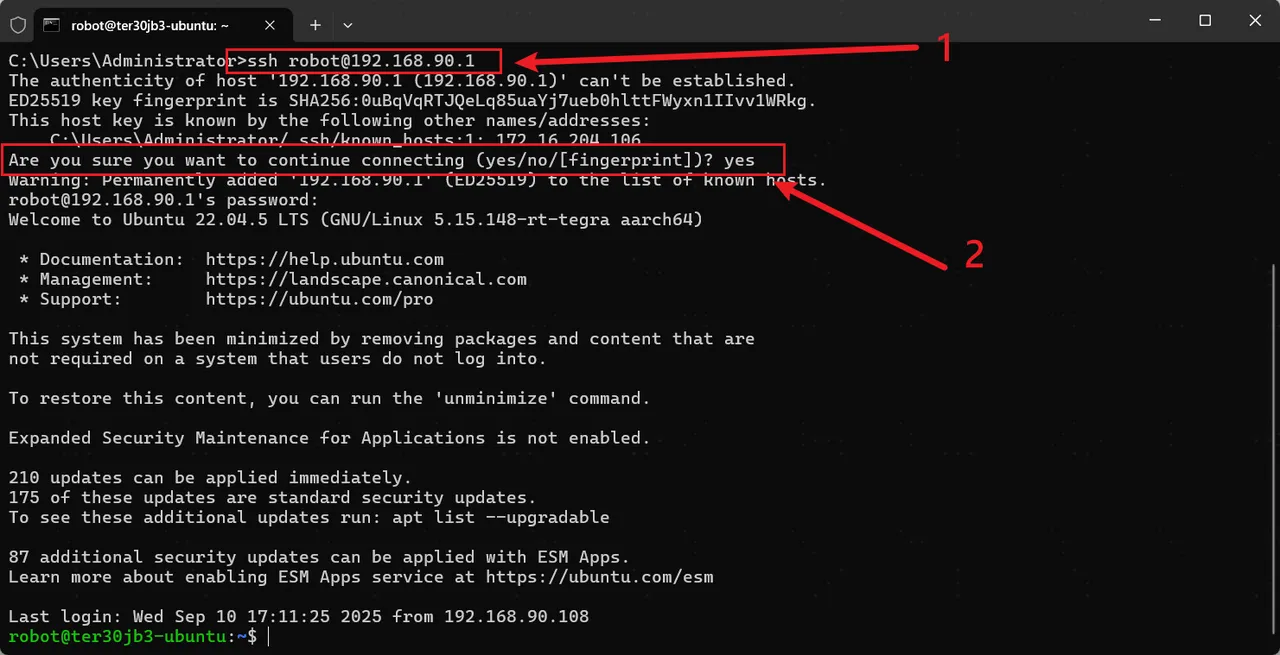
若需配置 Wi-Fi 连接,请继续以下操作。
-
在上一步的终端中继续输入
sudo nmcli device wifi list命令,以查看当前可用的 Wi-Fi,并记录要连接的 Wi-Fi 的名称(SSID)。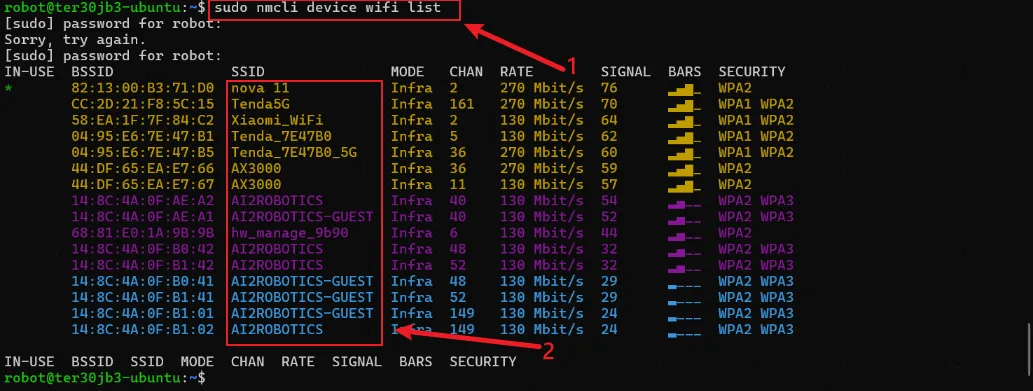
-
在上一步的终端中继续输入
sudo nmcli device wifi connect <SSID> password <password>命令,以连接新的 Wi-Fi,其中<SSID>和<password>分别替换为要连接的 Wi-Fi 的名称和密码。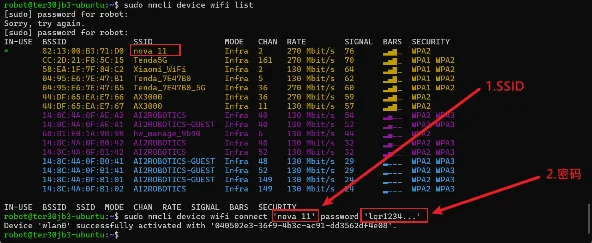
-
输入
ifconfig命令以查看无线网络分配给主控版的 IP 地址(即wlan0/wlp2s0IP 地址),以检查并确认是否已经成功连接到指定的 Wi-Fi 网络,自此 Wi-Fi 配置完成。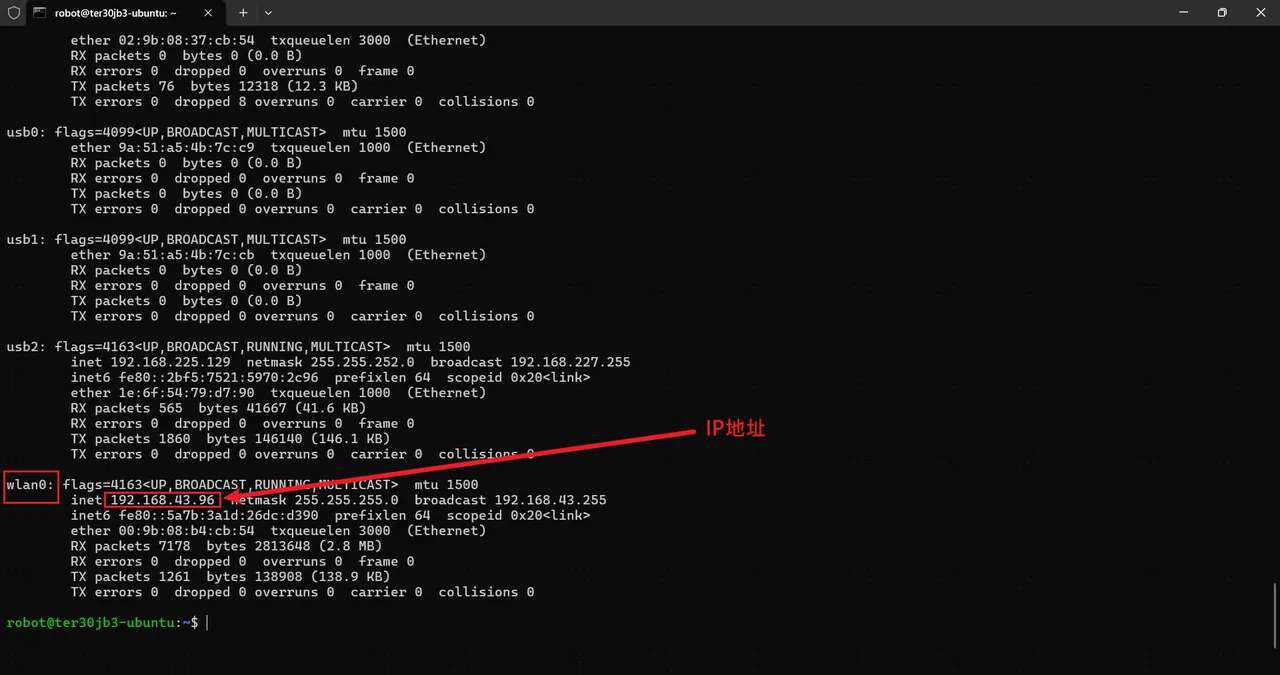
-
完成 Wi-Fi 配置后,电脑连接上述 Wi-Fi,然后在终端输入命令
ssh robot@x.x.x.x,其中x.x.x.x为上一步获取的 IP 地址,随后输入yes,以及登录密码,登录成功。每次连接主控板时,无需再配置 Wi-Fi。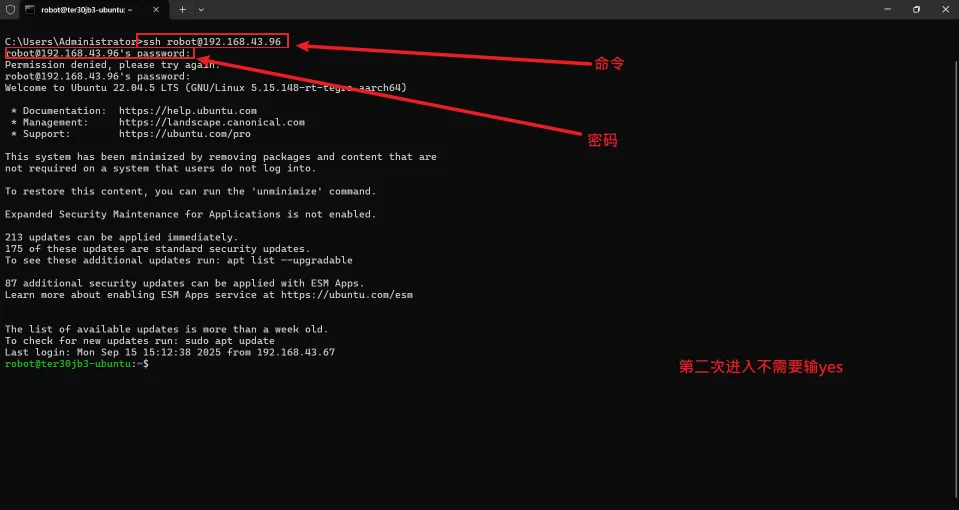
操作底盘上位机软件
Section titled “操作底盘上位机软件”AlphaBot 2 提供两款底盘上位机软件。下表为两款软件的信息,请根据实际使用场景选择合适的软件。
软件名称 | 适用平台 | 说明 |
|---|---|---|
| AI2ROBOTICS Design | Windows 电脑 | 具备地图编辑、任务编辑和监控信息三大功能,便于操作人员在多机工作的场景下灵活监控与管理机器人。 |
| AI2ROBOTICS Mobile | Android 平板 | 集成实时监控与控制、任务规划、设备配置、地图构建等功能于一体,方便操作人员在移动场景下更好的监控与管理机器人。 |
AI2ROBOTICS Design
Section titled “AI2ROBOTICS Design”通过以下步骤,您可以快速掌握 AI2ROBOTICS Design 软件的使用方法。
-
打开 AI2ROBOTICS Design 软件,进入首页,点击左下角的
设置图标,选择连接。
-
在弹窗中,输入调度或机器人底盘的 IP 和端口号,点击
连接。连接成功后,底部状态栏将提示已连接,并显示连接的 IP 地址。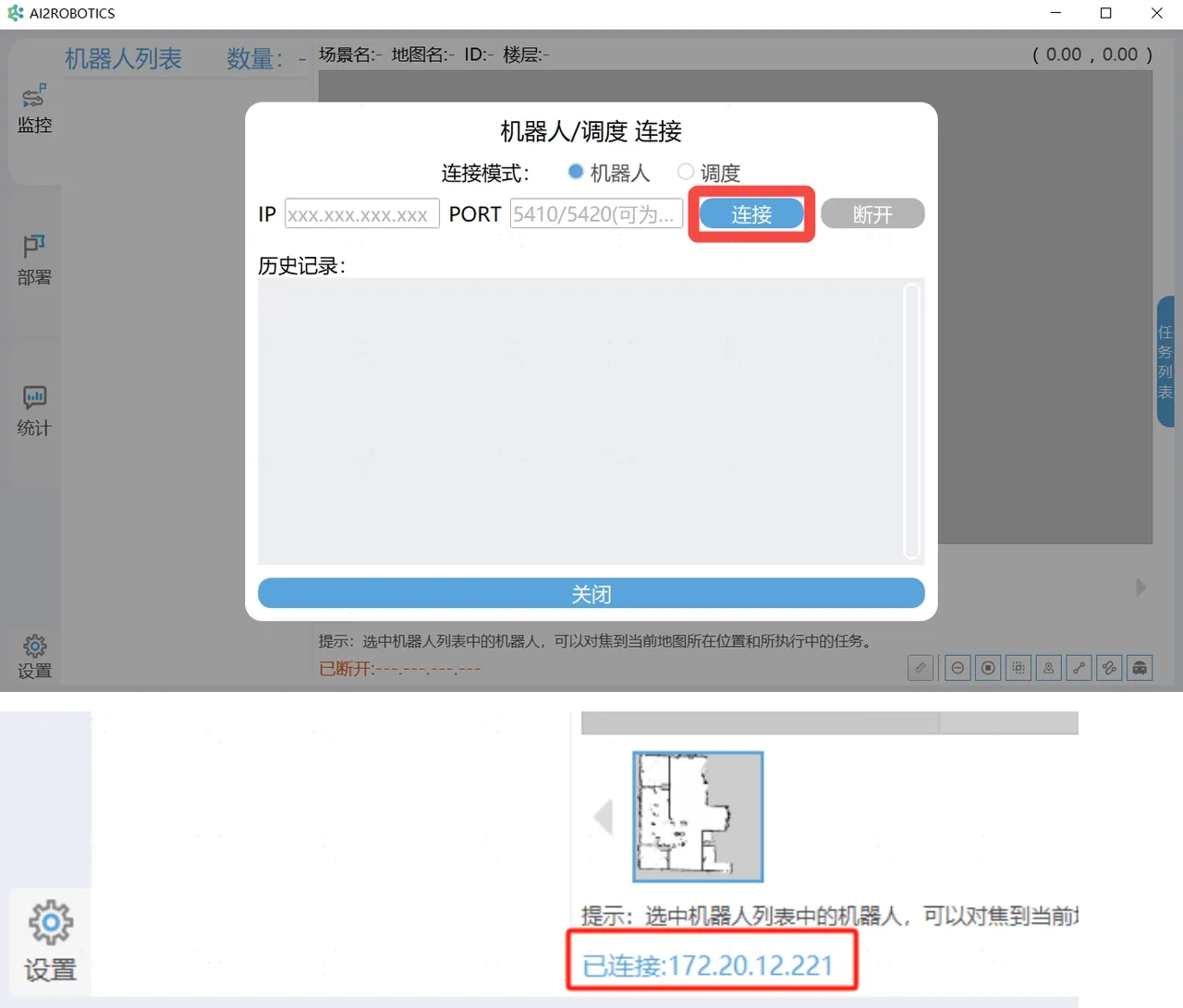
-
连接成功后,点击左侧导航栏的
监控,即可查看机器人当前的状态信息。 -
点击左侧导航栏的
部署,进入部署界面,在此界面可进行地图编辑、域编辑、部署点位、软引导、任务编辑(任务集和动作组合)和场景库等操作。 选项
选项说明 地图编辑 点击进入地图编辑页面,编辑地图的实体墙、通行区、导航禁区、交管禁区。 域编辑 编辑一些常见的域,约束机器人在该区域的一些行为和准则。 软引导编辑 约束机器人行走路径的行为和准则。 点位编辑 编辑一些导航目标点,任务的目标点位,包括运输、举升搬运、充电桩、停车点等。 任务编辑 根据部署的点位和动作组编辑一些任务集,比如循环任务、超时等待任务、临时任务等。 场景库 加载地图场景,用于编辑和部署任务。 -
点击左侧导航栏的
统计,即可查看统计信息。
AI2ROBOTICS Mobile
Section titled “AI2ROBOTICS Mobile”通过以下步骤,您可以快速掌握 AI2ROBOTICS Mobile 软件的使用方法。
-
进入平板系统的 Wi-Fi 连接界面,连接机器人热点
AI2Rocks-xxxx(xxxx 为序列号),输入默认密码88888888。如已连接机器人热点,则可跳过此步。 -
打开 AI2ROBOTICS Mobile 软件,进入首页,点击
未连接,输入底盘固定 IP 地址169.254.128.2,点击连接。
-
连接成功后,在首页中,可选择监控、地图、任务、设置、设备等选项进行操作。

选项 说明 监控 查看当前连接的机器人正在使用的导航地图信息。 地图 查看当前连接的机器人所有的导航地图信息。 任务 根据部署的点位和动作组编辑一些任务集,比如循环任务、超时等待任务、临时任务等。 设置 修改机器人相关信息、遥控机器人行进。 设备 查看机器人状态、电流等信息。
使用机械臂 Web 示教器
Section titled “使用机械臂 Web 示教器”AlphaBot 2 提供一款基于 Web 的机械臂示教器软件,您可在浏览器中输入 URL,进入示教界面,对机械臂和控制器进行操作并查看相关信息。
通过以下步骤,您可以快速掌握机械臂 Web 示教器软件的使用方法。
-
打开浏览器,输入
192.168.1.18(左臂)或192.168.1.19(右臂),回车进入登录页面。
-
在登录页面,输入用户名
user和密码123,点击登录。
-
点击左侧导航栏的
机械臂示教,进入示教界面,在此界面可进行示教操作。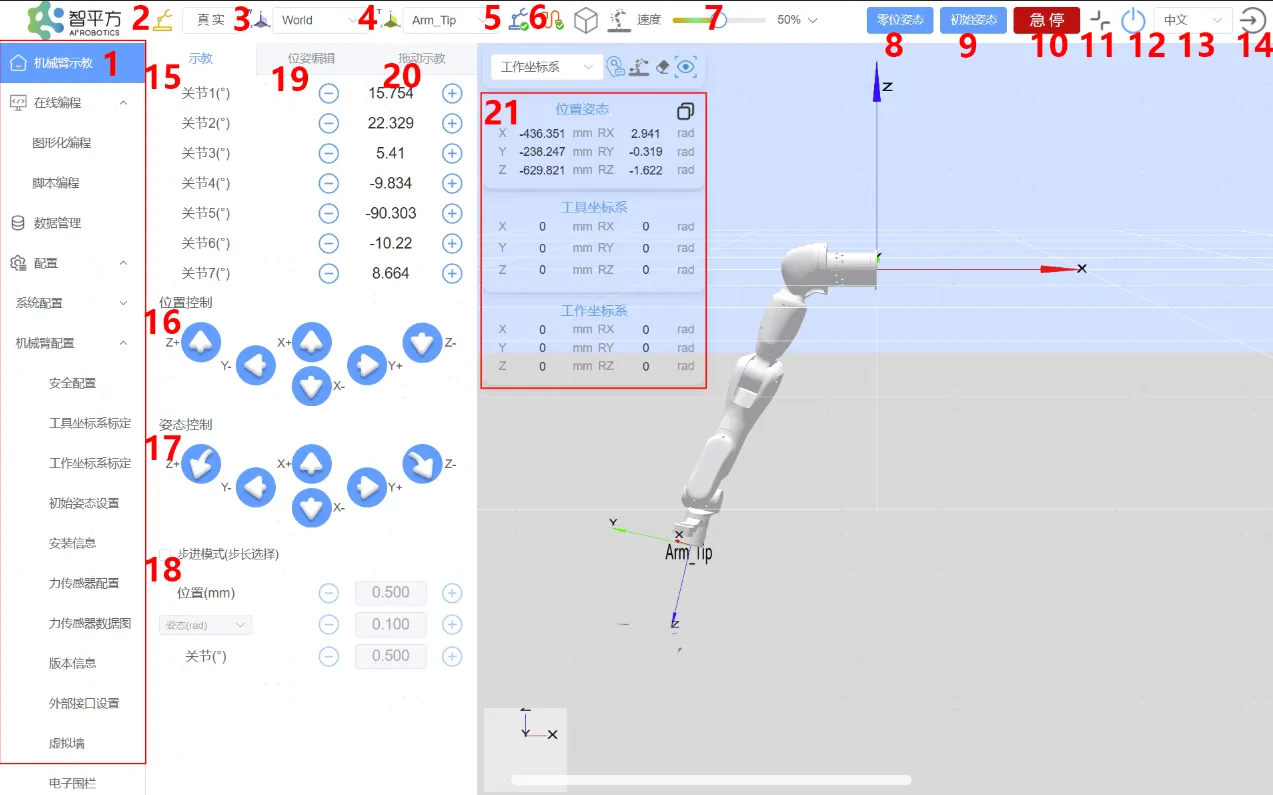 序号功能
序号功能说明 1 菜单栏选项 用于切换机械臂示教、在线编程、数据管理、配置、系统信息和扩展等功能。 2 工作模式 黄色图标代表选择真实模式,此时程序在真实机械臂上运行。灰色图标代表选择仿真模式,此时真实机械臂不运动,只移动 3D 仿真模型。 3 工作坐标系 用户可以选择工作坐标系对机械臂运动状态进行控制。 4 工具坐标系 默认显示的位姿目标是法兰盘中心,用户自己可以设定工具坐标系。 5 机械臂状态 当机械臂发生错误时,会在此处提示错误,点击图标可打开错误提示列表。 6 网络连接状态 当与机械臂连接正常时,变为绿色,断开通讯时,变为红色。 7 速度 此处可拖动滑动条来设置机械臂运动速度占最大速度的百分比。 8 零位姿态 长按可使机械臂回到零位。松开按钮运动停止。 9 初始姿态 长按可使机械臂回到初始位置。 10 急停 按下急停按钮后,机械臂以最大速度停止,再次按下,取消急停,可重新对机械臂进行操作。 11 全屏按钮 该按钮用来控制示教界面进入全屏和退出全屏。 12 电源开关按钮 该按钮用来控制电源开关,蓝色代表机械臂电源处于开启状态,灰色代表机械臂电源处于关闭状态。 13 中英文切换按钮 点击中英文切换按钮可进行中文版示教器与英文版示教器的切换。 14 退出登录按钮 点击退出登录。 15 关节控制 使用示教界面上的关节控制按钮便可控制每个关节的转动。 16 位置控制 用户可以对末端进行不同坐标系下的示教。 17 姿态控制 用户可以对末端进行不同坐标系下的示教。姿态示教时,末端位置不变,姿态绕指定坐标轴发生变化。 18 步进模式 为了能够增加示教的精度,需要用到步进控制这个模式,能够让被控制的变量以步进的方式精确变化。 19 位姿编辑 该区域可对机械臂运动姿态进行编辑,点击应用到达编辑位姿。 20 拖动示教 按住机械臂末端绿色按钮,机械臂将处于可拖动状态,拖动机械臂末端进行轨迹记录,松开绿色按钮即完成轨迹记录。点击机械臂末端蓝色按钮,机械臂自动回到轨迹起始位置,并进行一次轨迹复现。 21 机械臂位置姿态参数显示区域 显示机械臂末端的位姿参数,包括位置坐标和欧拉角姿态。 -
点击左侧导航栏的
扩展 -> 末端控制,可对末端执行器进行配置。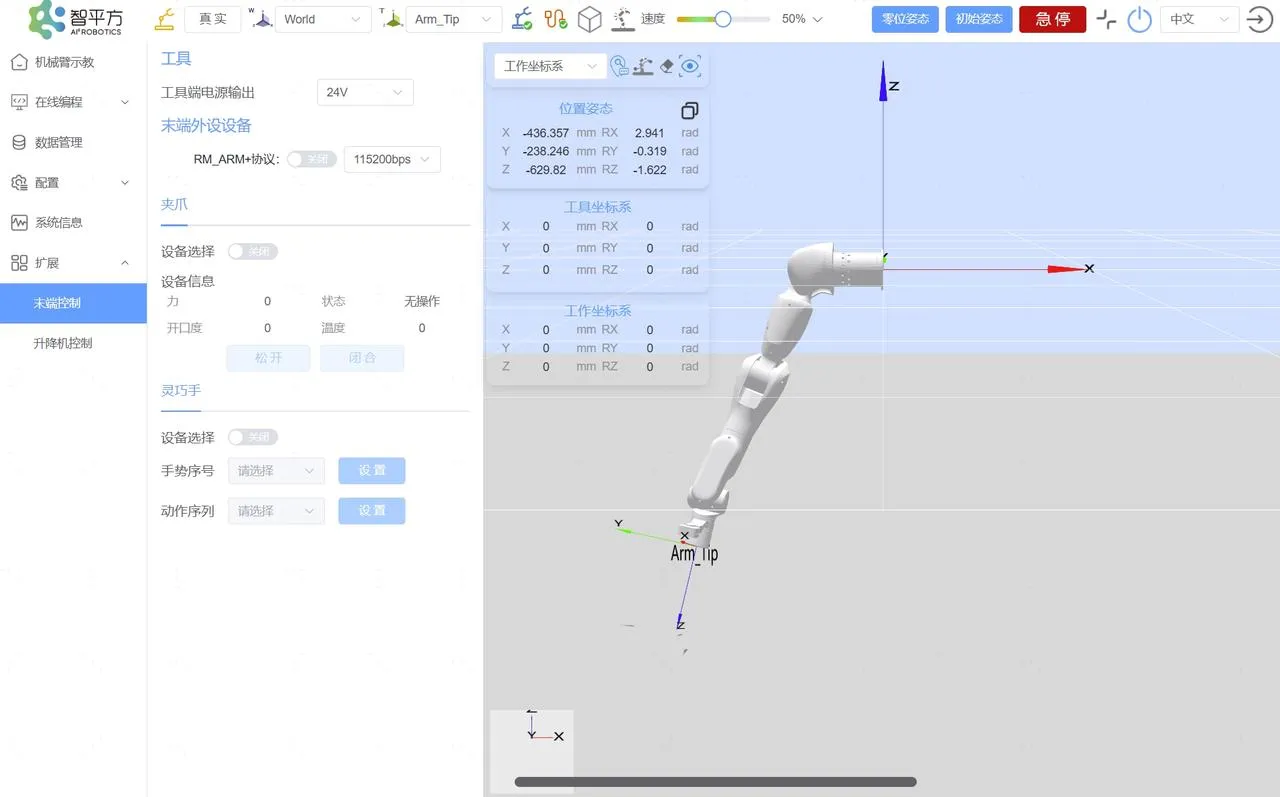
功能 说明 工具端电源输出 可配置工具末端接口板对外的输出电源,选项为 0V、5V、12V 和 24V。 末端外设设备 目前仅支持夹爪和灵巧手,后续可增加对其他设备的支持。
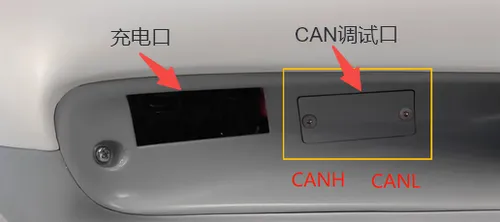
调试底盘 CAN 接口
Section titled “调试底盘 CAN 接口”AlphaBot 2 底盘配备了 CAN 调试接口,供我司工程师在电机出现异常需检修时使用。请勿擅自调试。
升级机械臂固件
Section titled “升级机械臂固件”-
参考使用机械臂 Web 示教器,通过
192.168.1.18(左臂)或192.168.1.19(右臂)IP 地址登录至机械臂 Web 示教器界面。 -
参照下图步骤,选择固件文件,进行升级。
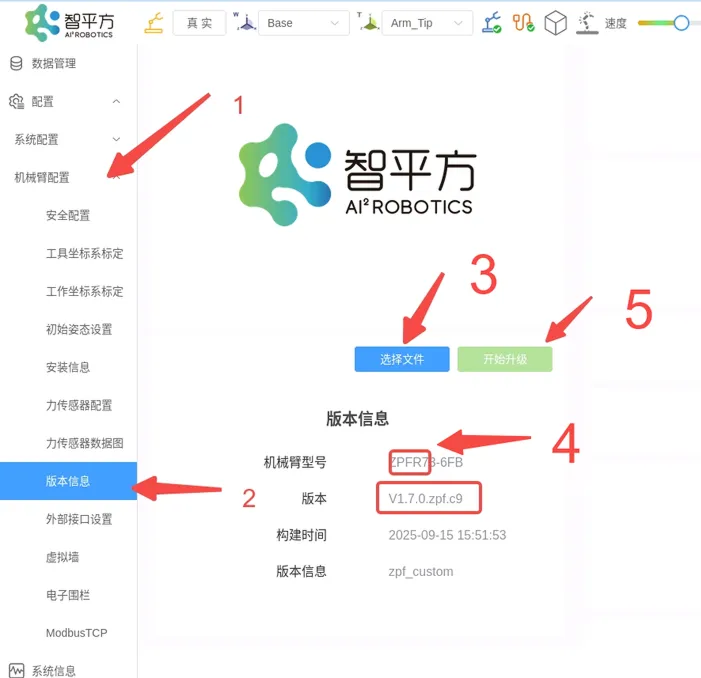
-
稍等片刻,待升级完成后,机械臂会发出“嘀嘀嘀”的声音。升级完成后,请重新启动机械臂,以使新固件生效。
-
机械臂重启后,打开 WEB 示教器,进入到示教器首页之后,按下 Ctrl+F5 进行浏览器强制刷新,清理缓存。此时机械臂和 WEB 示教器可正常使用。
升级机械臂末端控制器固件
Section titled “升级机械臂末端控制器固件”-
参考使用机械臂 Web 示教器,通过
192.168.1.18(左臂)或192.168.1.19(右臂)IP 地址登录至机械臂 Web 示教器界面。 -
参照下图步骤,选择固件文件(tool.bin 文件),进行升级。升级完成后,请重新启动机械臂,打开 WEB 示教器,按下 Ctrl+F5 进行浏览器强制刷新,此时末端接口板版本号已更新。

升级因时夹爪固件
Section titled “升级因时夹爪固件”-
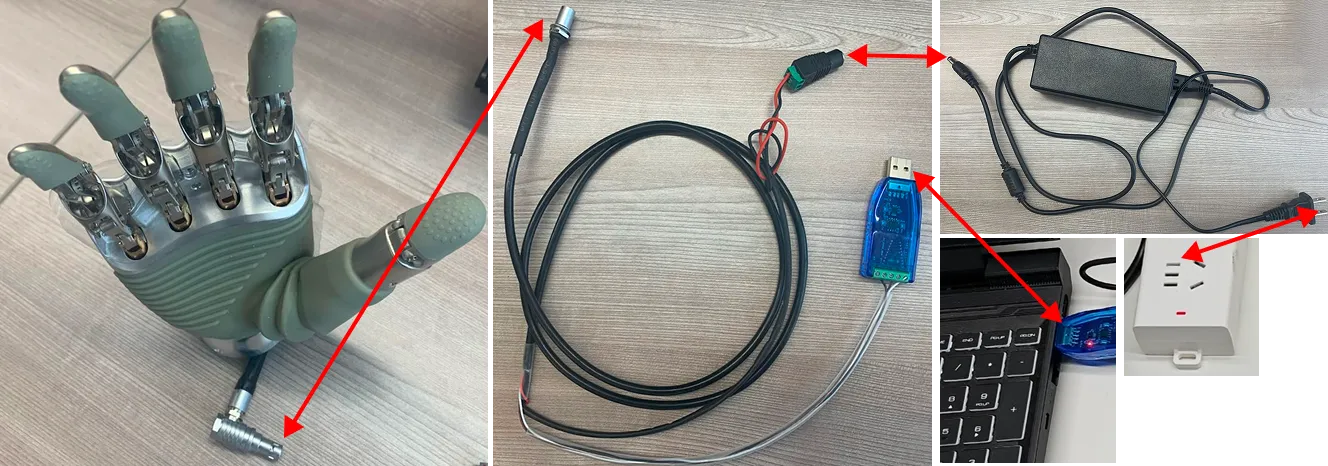
准备夹爪(大夹爪或小夹爪)、电源线、数据线、电脑(Windows 系统)、固件文件和因时驱动器固件升级软件。

-
将电源线一端与数据线连接,另一端与电源连接。
-
将数据线一端与夹爪连接,另一端与电脑 USB 接口连接。
-
打开因时驱动器固件升级软件(.exe 文件),选择夹爪对应的固件文件(.bin 文件),点击
开始。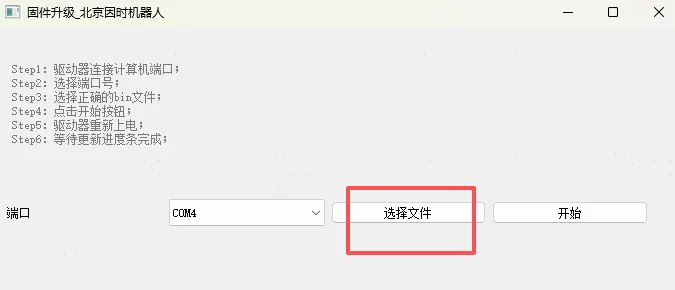
-
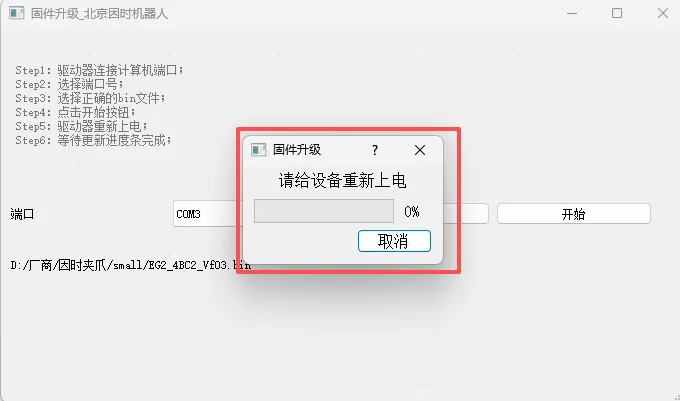
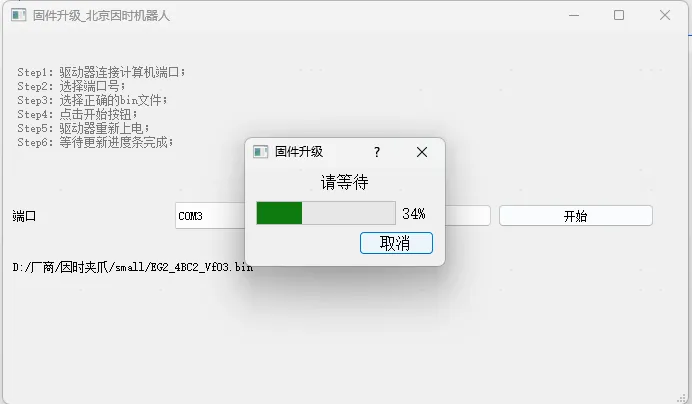
弹出如下提示,请重新插拔电源,等待进度条更新完成。
-
在机械臂 Web 示教器界面,点击
扩展 -> 末端控制,将工具端电源输出配置为夹爪对应的电压,打开RM_ARM+协议,将出现夹爪信息。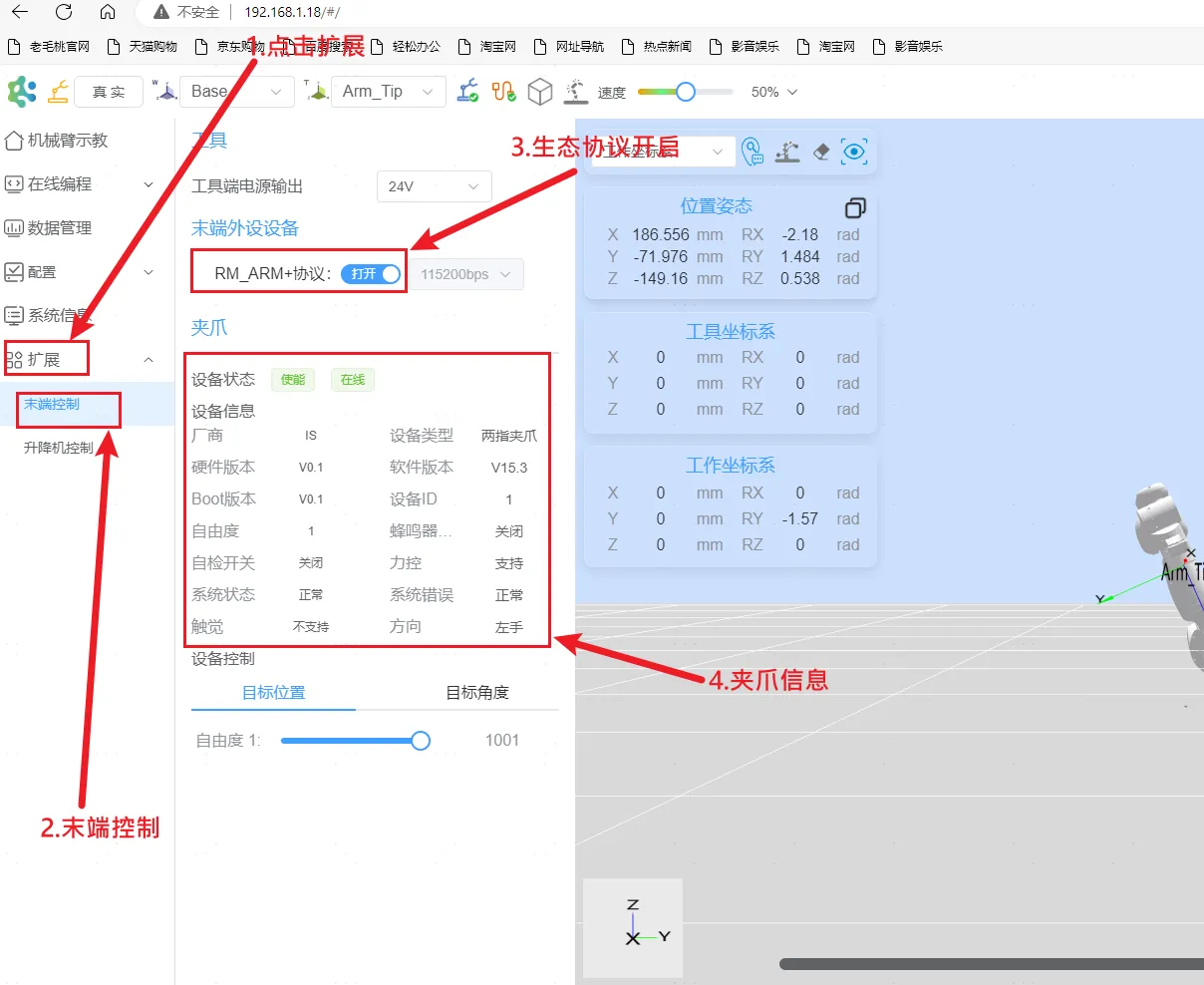
-
在目标位置下,拖动
自由度 1,控制夹爪闭合和张开。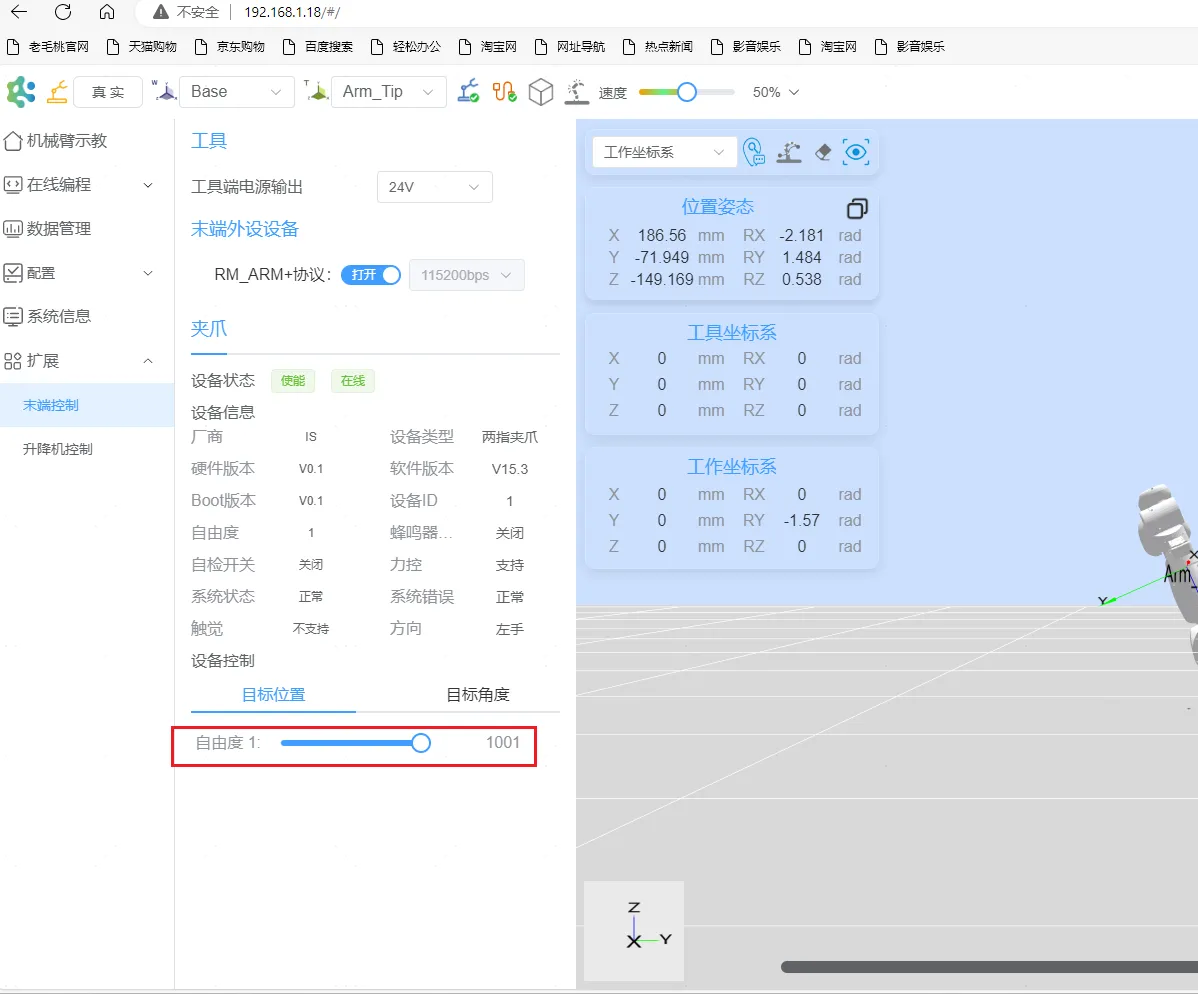
升级傲意灵巧手固件
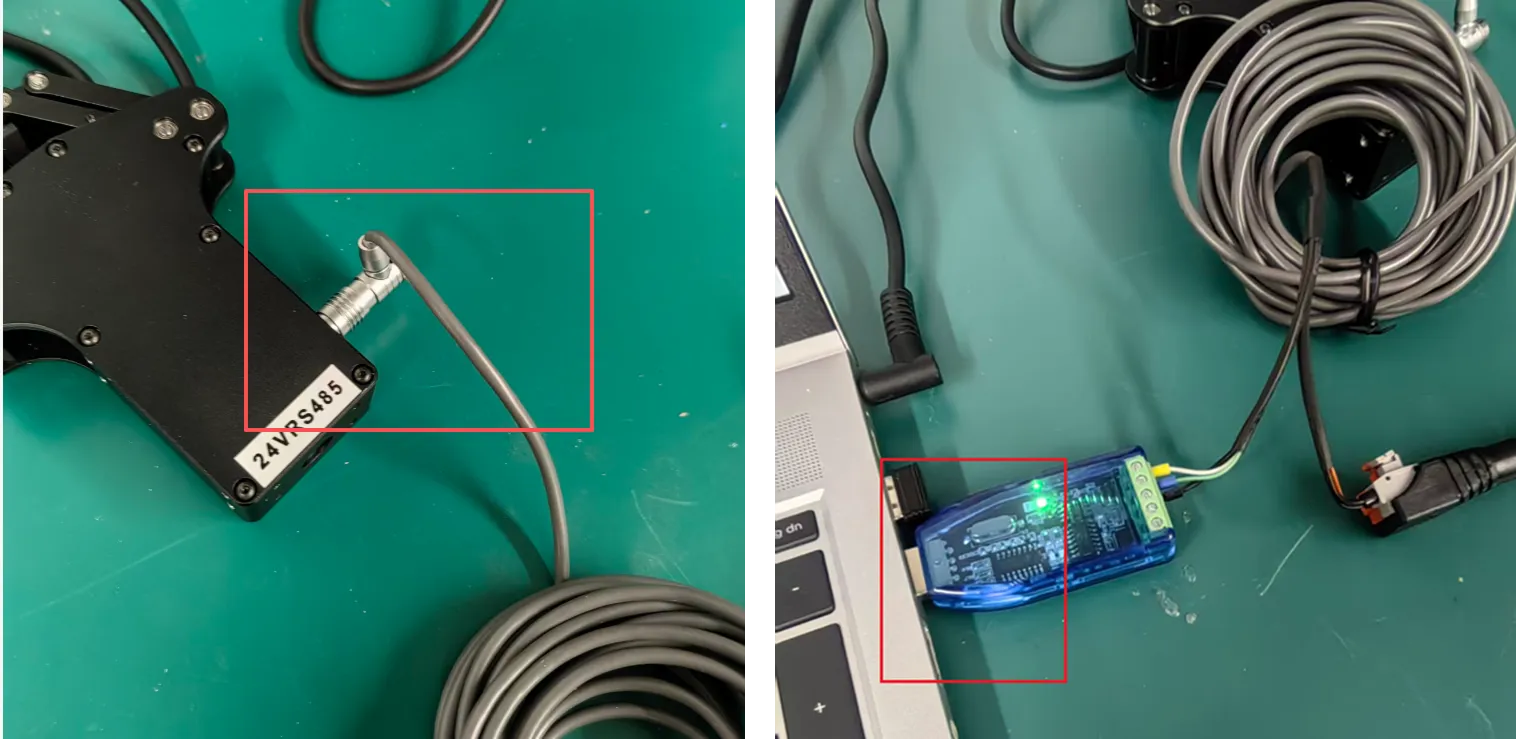
Section titled “升级傲意灵巧手固件”-
准备灵巧手、电源线、数据线、电脑(Windows 系统)、固件文件和傲意上位机软件(需下载并安装)。
-
参照下图,连接各部件。
-
打开傲意上位机软件,进入
基础信息界面,点击更新固件按钮,将进入固件升级模式,固件来源选择本地文件,点击确定,选择固件文件(.upd 文件)。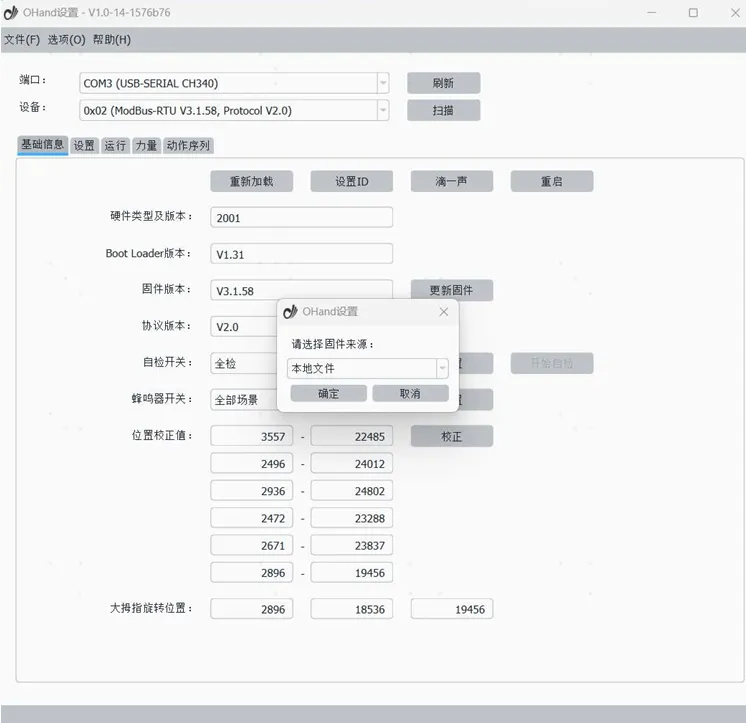
-
根据软件界面提示,完成固件升级。升级完成后,灵巧手会重新开机自检,此时再次扫描设备,会重新加载设备信息。
-
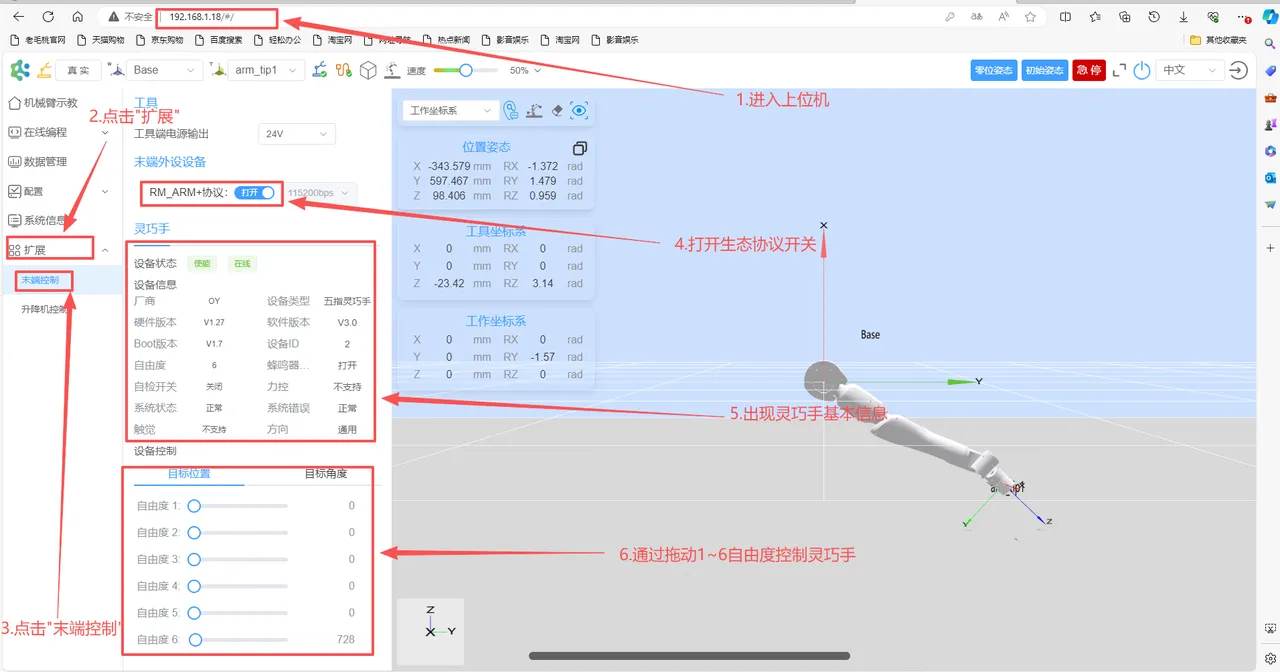
在机械臂 Web 示教器界面,点击
扩展 -> 末端控制,将工具端电源输出配置为灵巧手对应的电压,打开RM_ARM+协议,将出现灵巧手信息。在目标位置下,拖动自由度 1 - 6,控制灵巧手的运动。