常用操作
在使用 VR 遥操设备时,掌握以下操作将有助于您更高效地使用和操作设备。
启动 HMI 界面
Section titled “启动 HMI 界面”ROBOT-CONTROL-HMI(简称 HMI)是用于控制和监控机器人系统的图形用户界面,也是使用 VR 遥操设备时与机器人交互的核心工具。HMI 分为用户端(user)与机器人端(robot)两部分程序,使用前需分别启动,具体操作如下。
启动用户端程序
Section titled “启动用户端程序”-
确认已安装 Microsoft Edge 浏览器,并将其设置为默认浏览器。
-
在工控机上,打开终端,输入以下命令。
Terminal window cd ~bash ~/user_docker_start.sh -
上述脚本启动后,Microsoft Edge 浏览器会自动打开 HMI 界面。如未自动打开,请手动在浏览器地址栏输入
http://127.0.0.1:4090。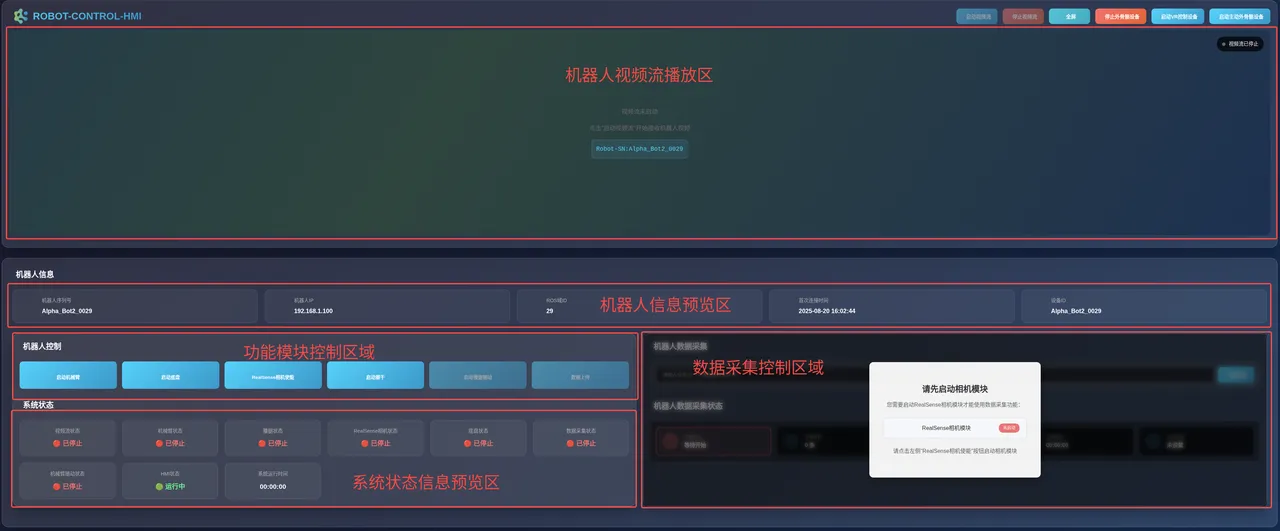
启动机器人端程序
Section titled “启动机器人端程序”-
在工控机上,打开另一个新终端,通过
ssh命令远程连接到机器人终端。Terminal window ssh <用户名>@<机器人 IP 地址> -
在连接成功的终端中,输入以下命令。
Terminal window cd ~bash ~/robot_docker_start.sh
在启动 HMI 界面后,便可使用 VR 设备对机器人进行控制。
使用 VR 设备
Section titled “使用 VR 设备”在使用 VR 设备前,请确保已完成以下前置配置。
-
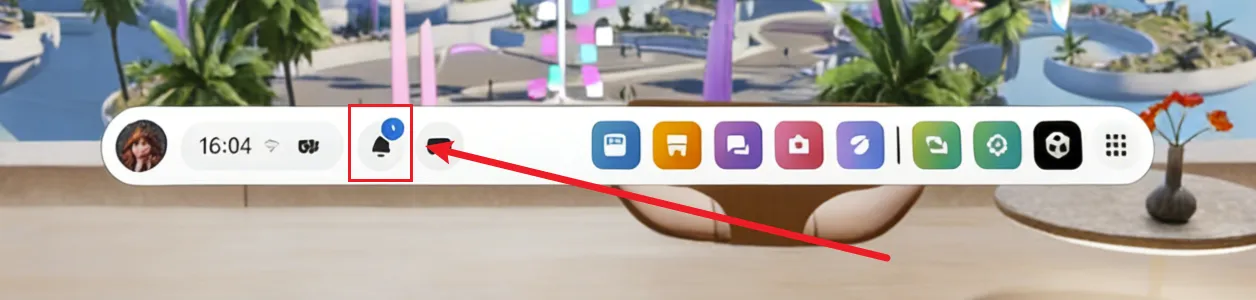
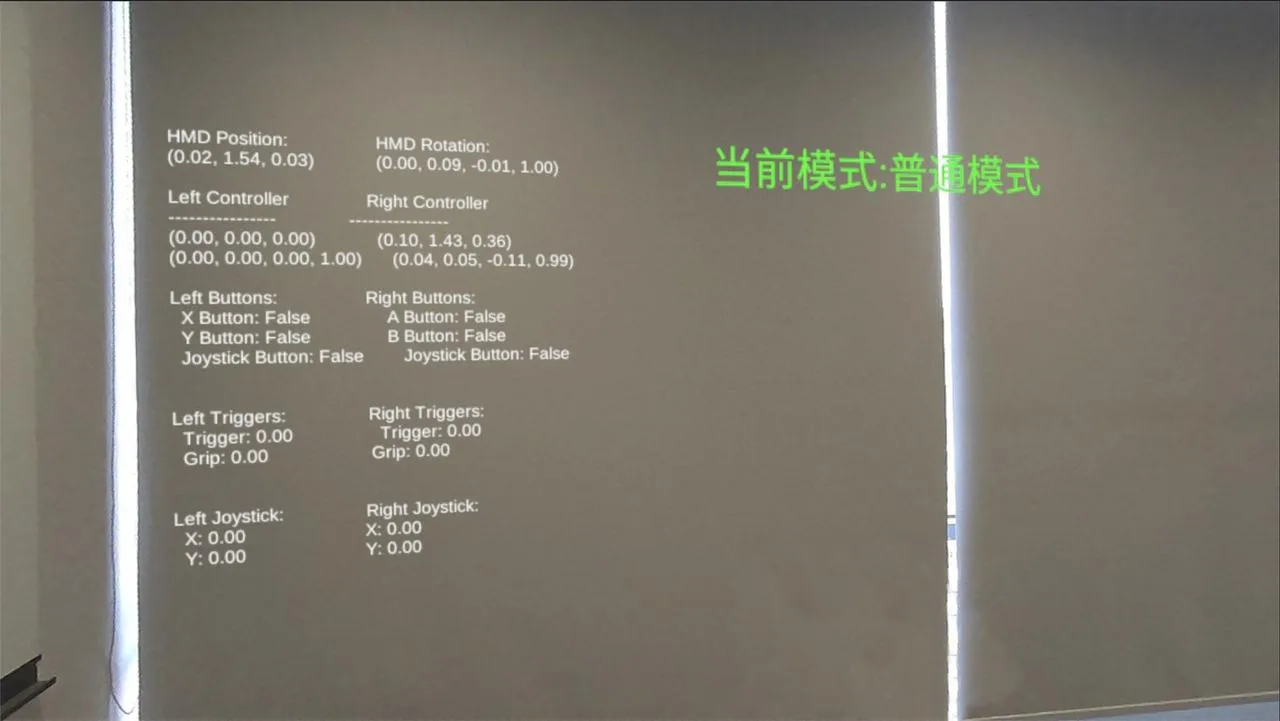
确保 VR 头显电量充足、已开机,并通过稳定数据线连接至工控机。双手持握手柄后,视角将呈现以下画面。若为首次连接或断开后重连,请点击 Tab 栏通知按钮(小铃铛)进入通知中心。
-
在通知中心,点击
检测到 USB,允许通过 USB 访问头显设备。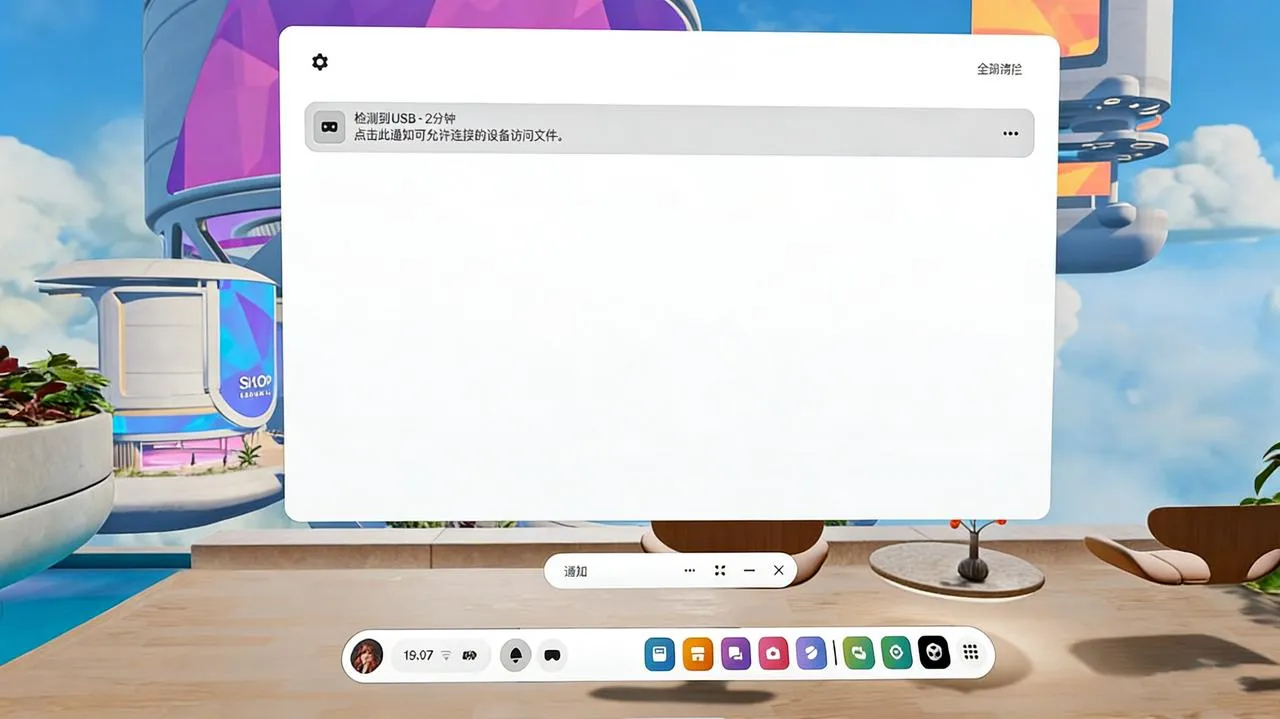
-
在如下弹窗中,点击
允许,允许 USB 调试。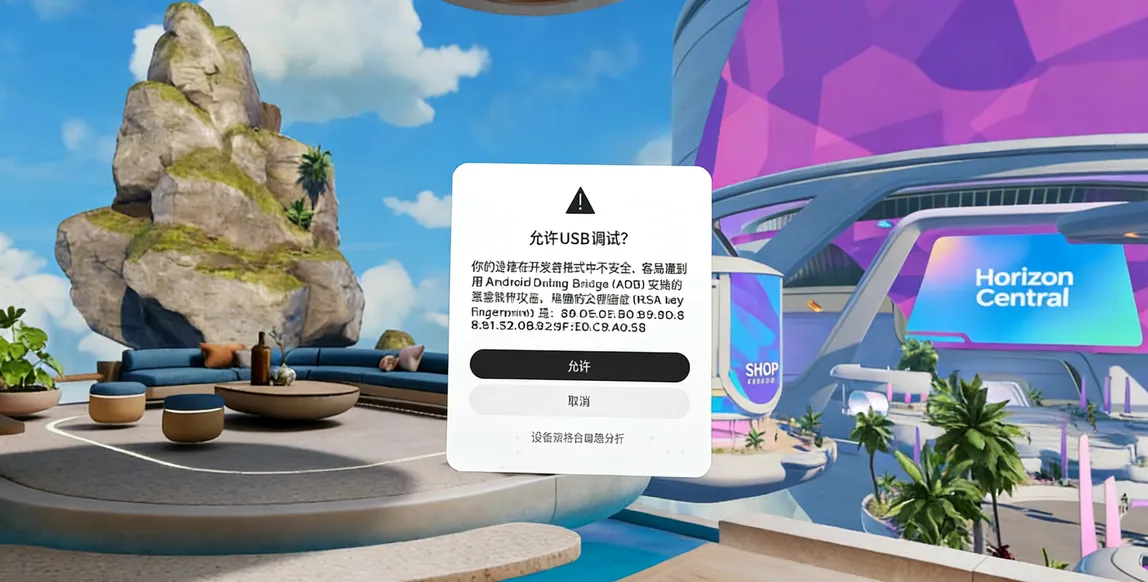
-
若以上操作无误,在工控机上打开一个新终端,输入如下命令。若显示以下内容,则表示头显设备已就绪。
Terminal window user@user:~$ adb devicesList of devices attachedXXXXXXXXXXXXXX device -
按下右手柄上的
菜单键,Tab 栏会重新显示。
-
点击 Tab 栏中的
APP,进入头显控制程序。
-
若显示如下界面,则表示前置配置已完成。
启动 VR 控制设备
Section titled “启动 VR 控制设备”-
在确保完成前置配置后,点击 HMI 界面中的
启动 VR 控制设备按钮。启动成功后,按钮将变为红色,同时文字显示为停止 VR 控制设备。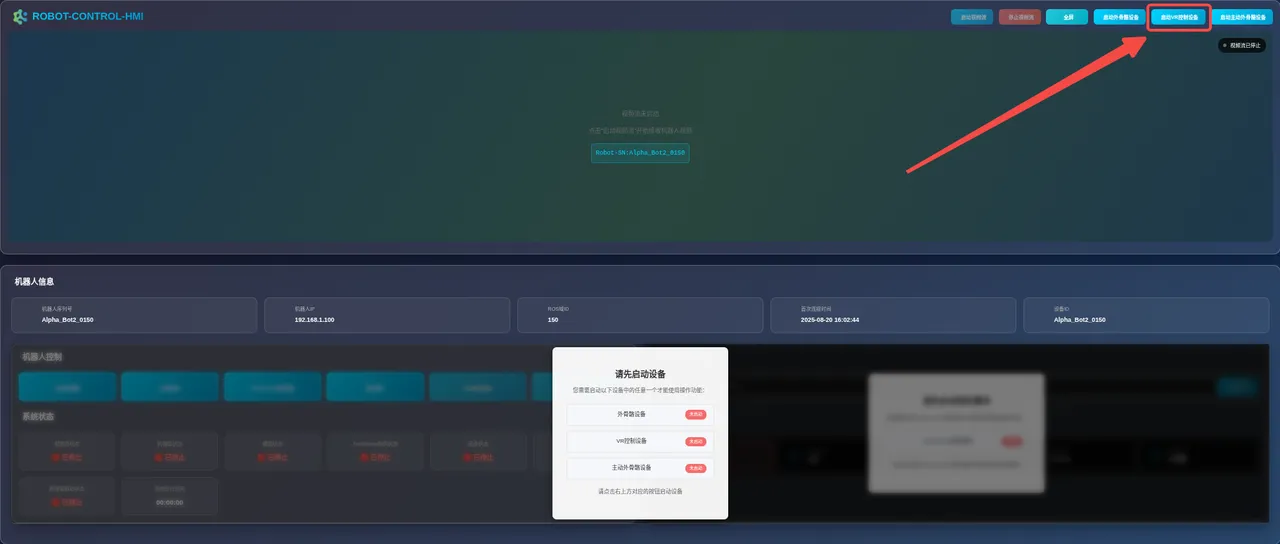
-
查看
系统状态区域,若VR 设备状态显示为数据正常,共 3 条,则表示启动成功。
启动相机和视频流
Section titled “启动相机和视频流”-
在确保完成启动 VR 控制设备后,在
机器人控制区域,点击启动 RealSense 相机按钮。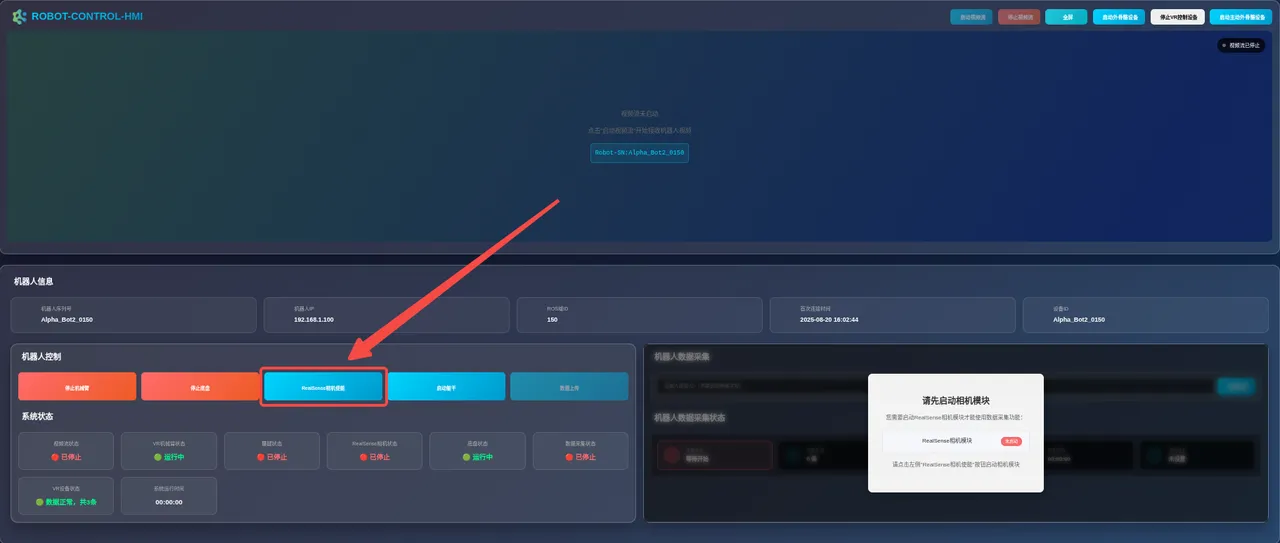
-
此时页面会弹出如下提示信息,请耐心等待。
-
启动成功后,RealSense 相机会进入自检状态,
启动 RealSense 相机蓝色按钮将变为停止 RealSense 相机红色按钮,同时系统状态区域中的 RealSense 相机状态为运行中。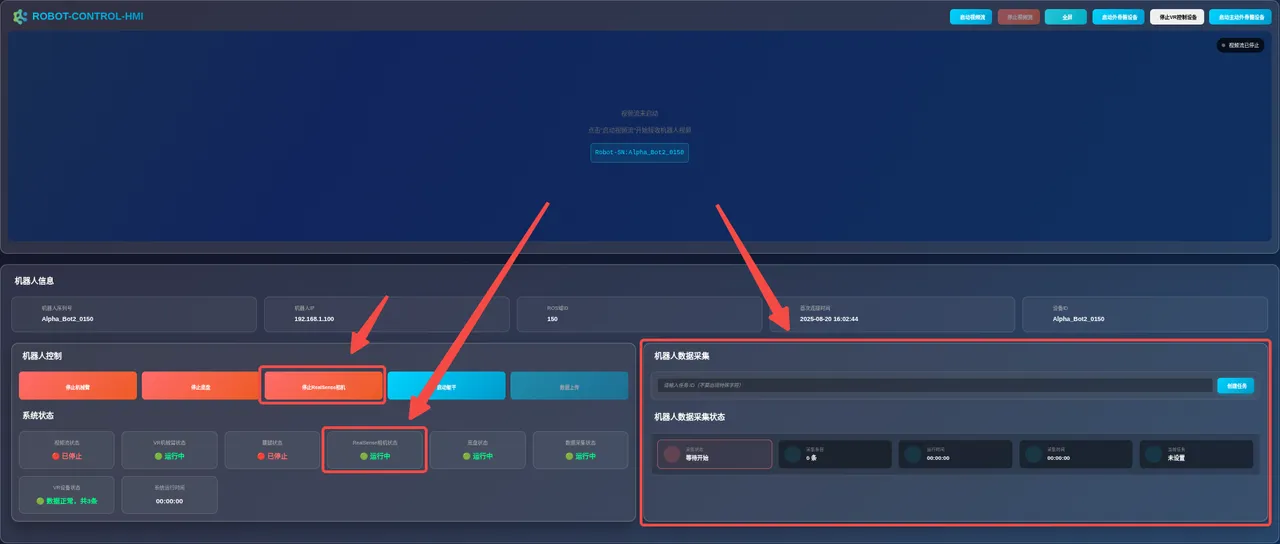
-
点击界面右上角的
启动视频流按钮。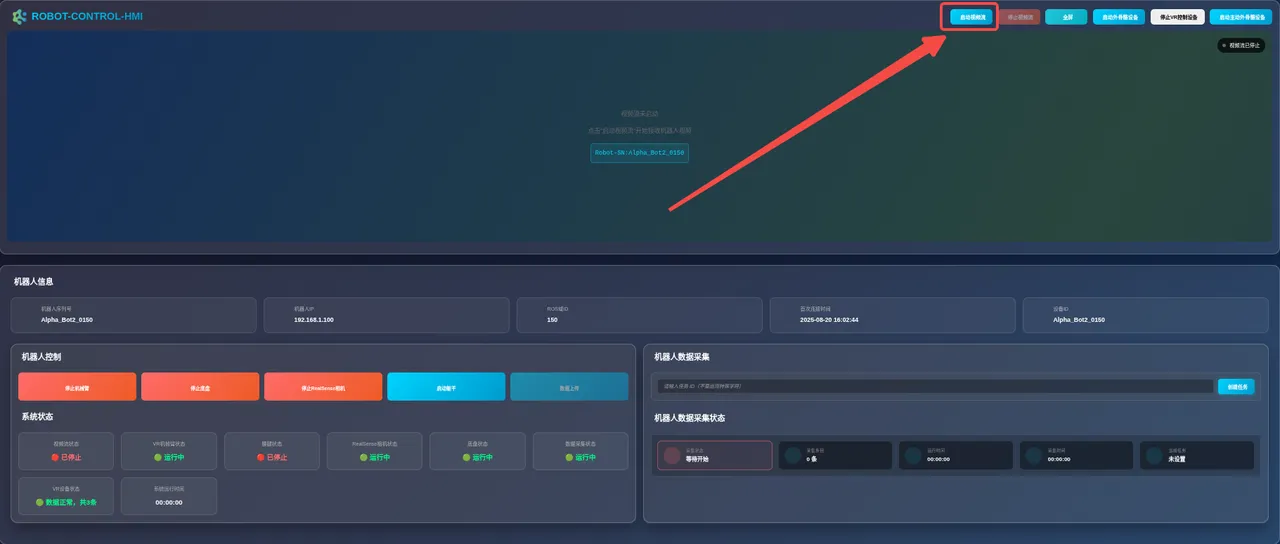
-
弹出如下窗口。该窗口会自动关闭。
-
视频流播放区将显示实时视频流,同时
系统状态区域中的视频流状态为运行中。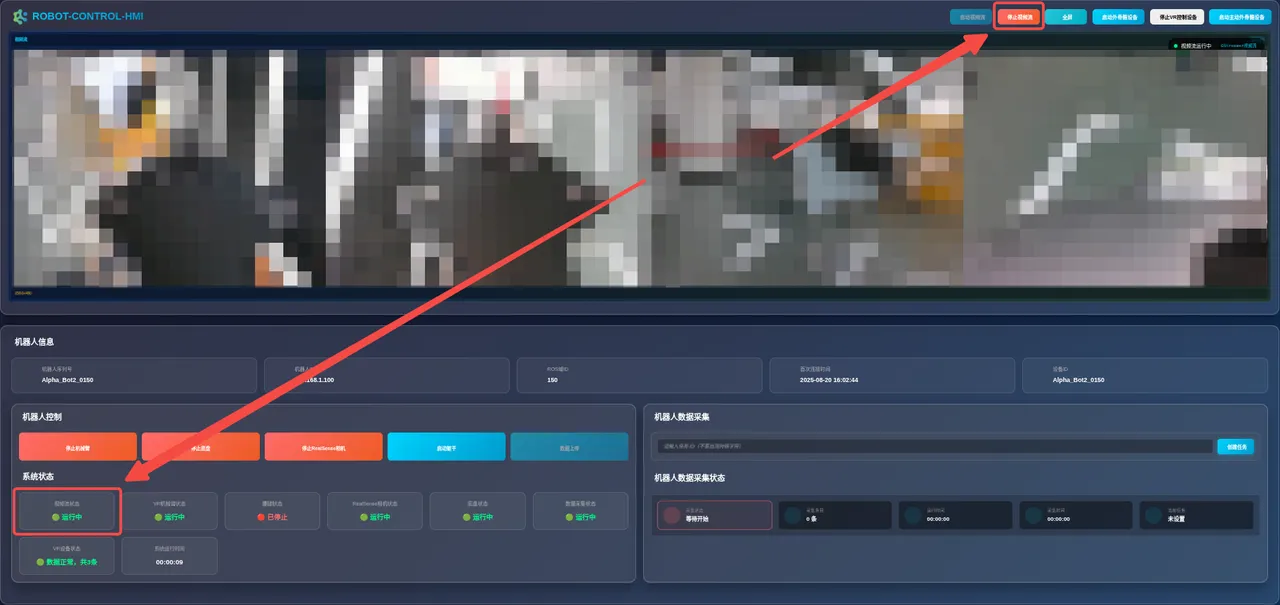
-
在确保完成启动相机和视频流后,在
机器人控制区域,点击启动机器臂按钮。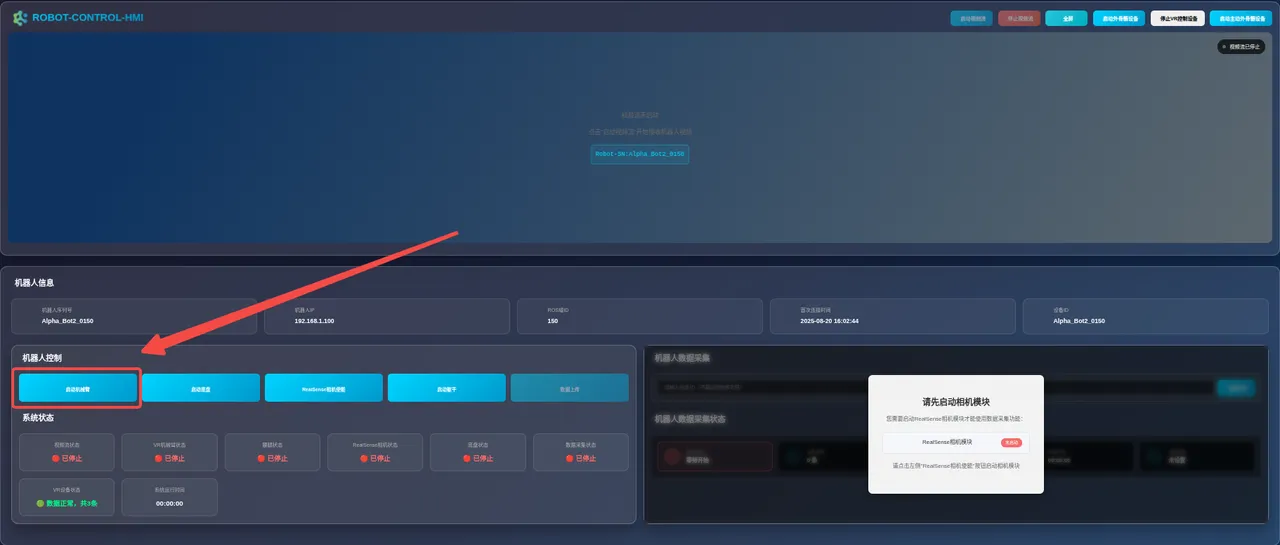
-
此时页面会弹出如下提示信息,请耐心等待。


-
启动成功后,机械臂会进入自检状态,
启动机械臂蓝色按钮将变为停止机械臂红色按钮,同时系统状态区域中的机械臂状态为运行中。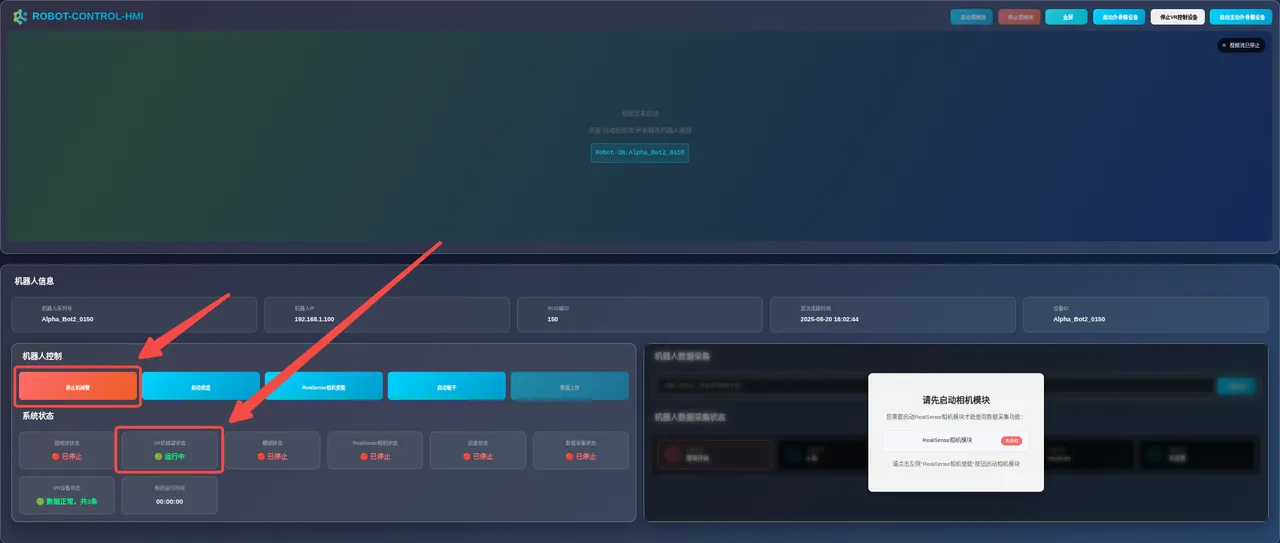
-
在确保完成启动相机和视频流后,在
机器人控制区域,点击启动躯干按钮。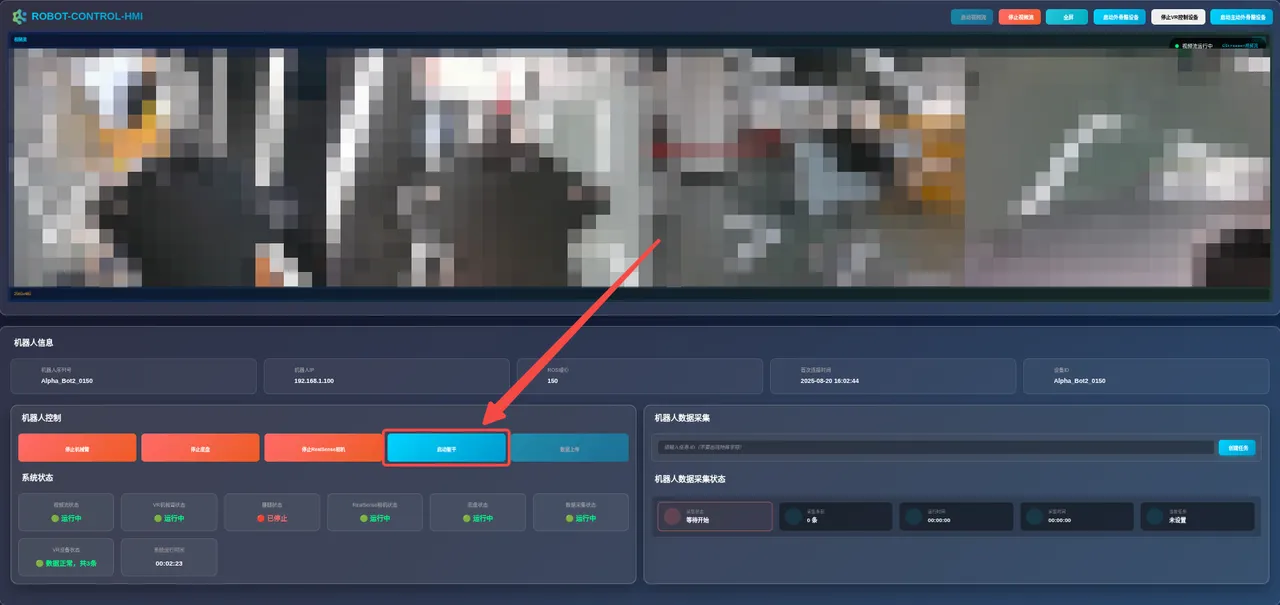
-
此时页面会弹出如下提示信息,请耐心等待。
-
启动成功后,躯干会进入自检状态,
启动躯干蓝色按钮将变为停止躯干红色按钮,同时系统状态区域中的躯干状态为运行中。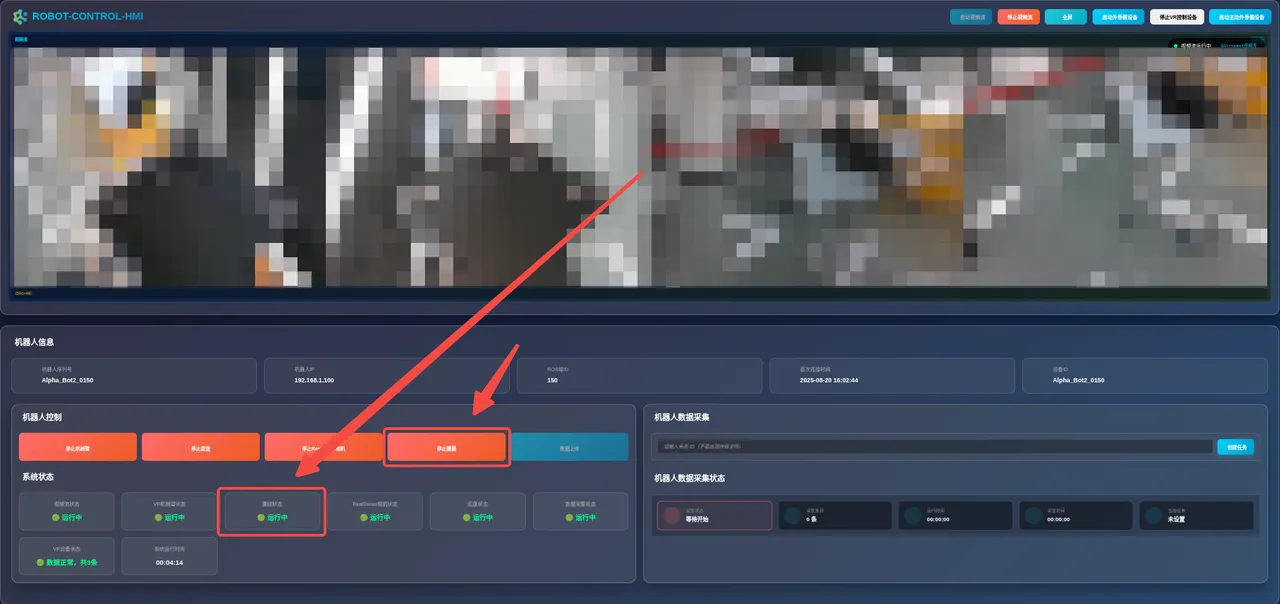
-
将底盘旋钮旋转至
自动模式,并断开充电线缆。 -
在确保完成启动相机和视频流后,在
机器人控制区域,点击启动底盘按钮。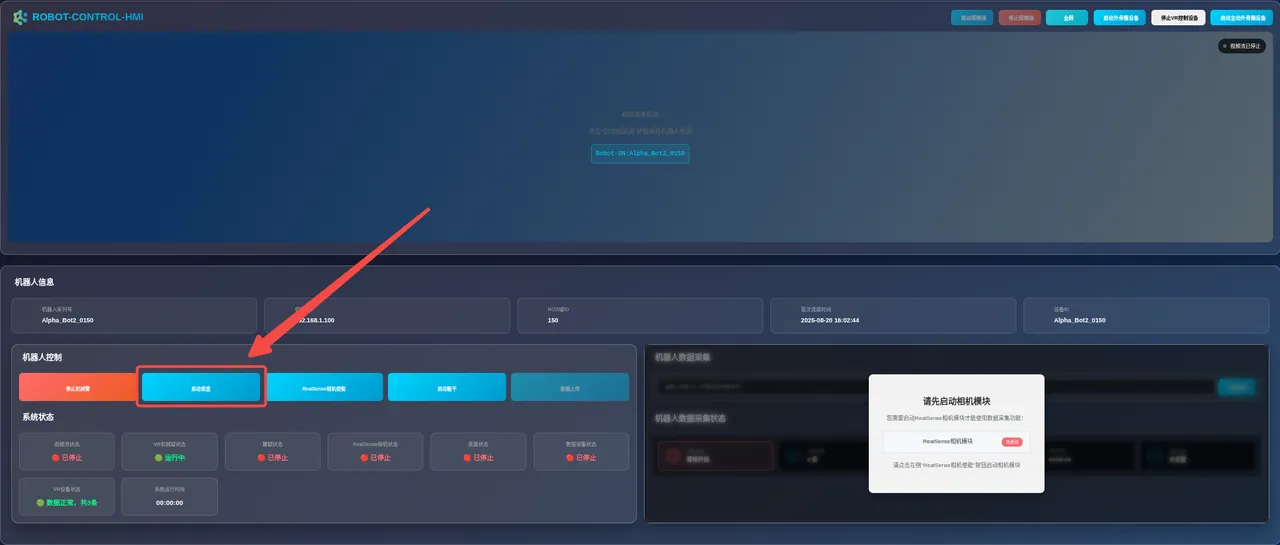
-
此时页面会弹出如下提示信息,请耐心等待。

-
启动成功后,底盘会进入自检状态,
启动底盘蓝色按钮将变为停止底盘红色按钮,同时系统状态区域中的底盘状态为运行中。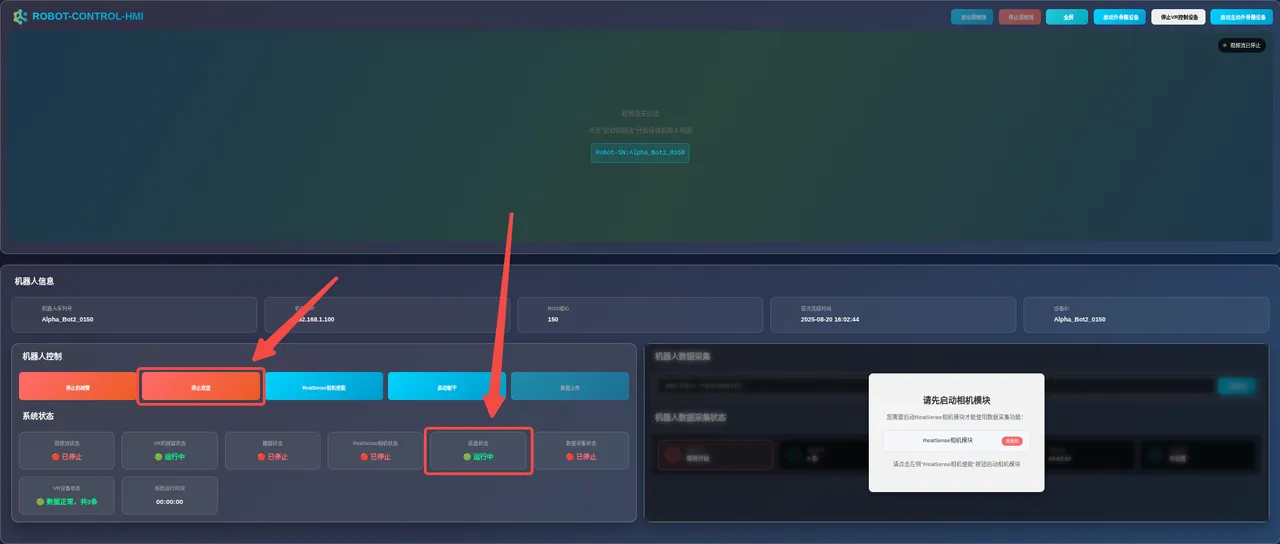
使用 VR 手柄
Section titled “使用 VR 手柄”在启动 VR 控制设备后,您便可使用 VR 手柄对机器人进行控制。
| 操作 | 说明 |
|---|---|
移动底盘 | 
|
跟随机械臂末端 | 
|
控制夹爪 | 
|
控制颈部 | 
|
控制腿部 | 
|
控制腰部 | 
|
复位机械臂 | 
|
在启动 VR 控制设备后,您可以通过 HMI 界面中的 机器人数据采集 功能来采集 VR 遥操设备的数据。
-
在
机器人数据采集区域,输入任务 ID,点击创建任务按钮。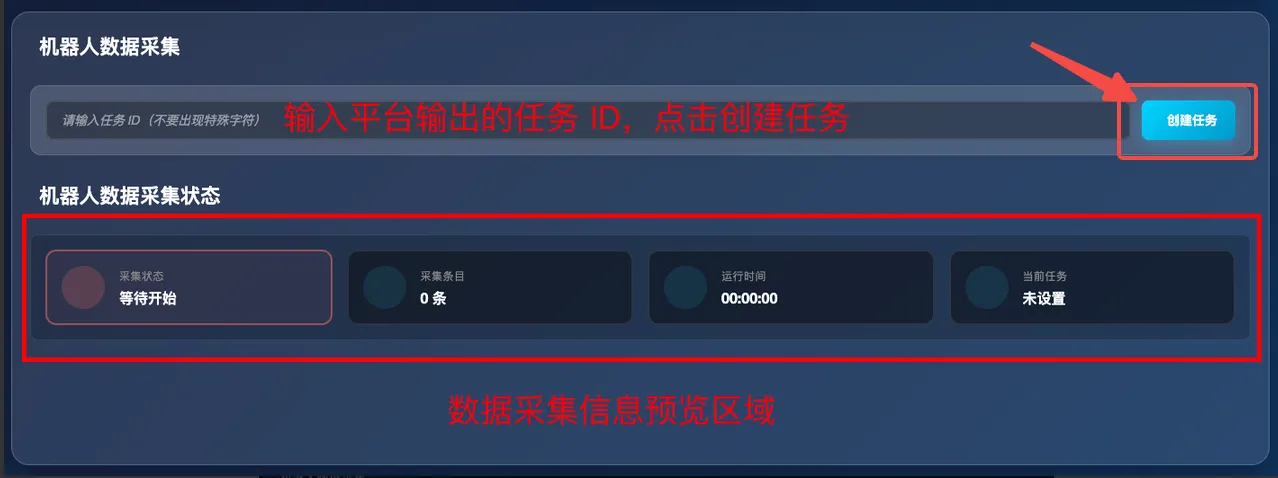
-
若为新任务,页面会弹出如下提示信息。
点击弹窗外空白处,即可关闭弹窗。
-
若任务 ID 已存在,页面会弹出如下提示信息,点击
确认按钮,以续存任务。
点击弹窗外空白处,即可关闭弹窗。
-
-
点击
发送任务按钮,发送成功后会有弹窗提示。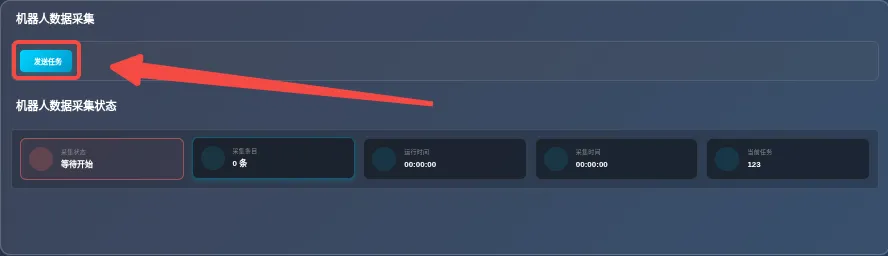
-
此时页面会弹出如下提示信息。点击弹窗外空白处,即可关闭弹窗。

在成功创建任务后,您便可开始采集数据了。
-
通过以下三种方法中的任意一种,开始采集数据。
- 点击
开始采集按钮。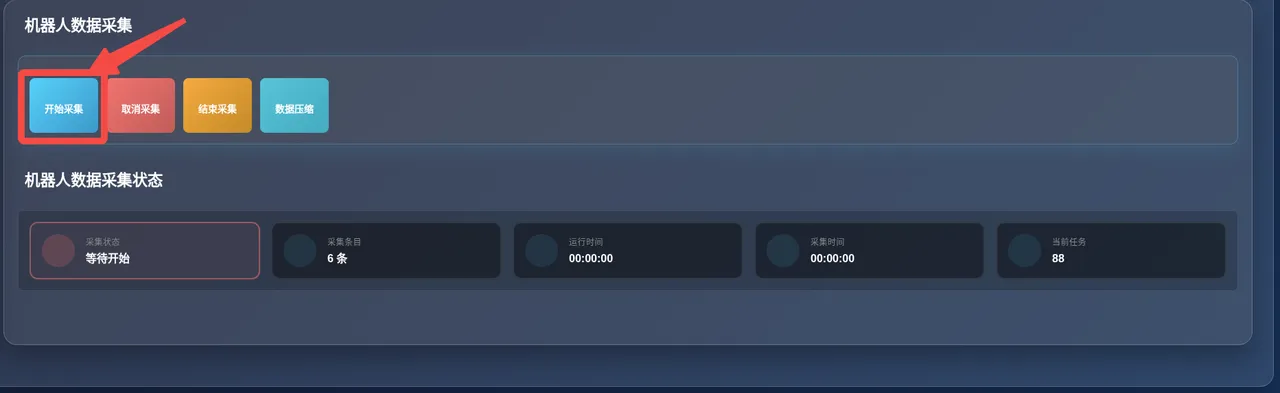
- 通过按下键盘
Ctrl+3快捷键来实现开始采集的功能。(注意:浏览器仅可打开 HMI 页面,请勿打开其他页面,现有快捷键与浏览器切页功能存在冲突。) - 通过按下踏板中键来实现开始采集的功能。
- 点击
-
开始采集后,
机器人数据采集状态区域中的采集状态从等待开始变为采集中,同时采集时间开始计时。
在采集过程中,您可以随时取消采集。
-
通过以下三种方法中的任意一种,取消采集数据。
- 点击
取消采集按钮。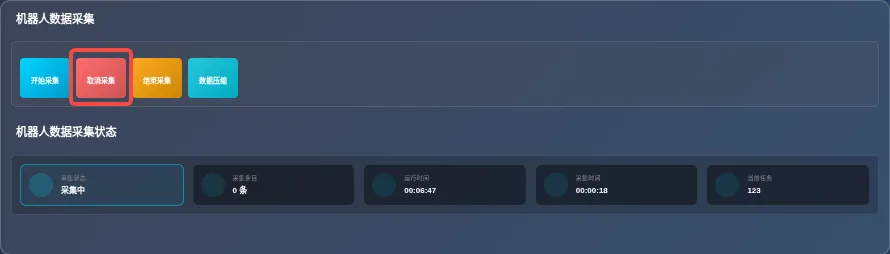

- 通过按下键盘
Ctrl+4快捷键来实现取消采集的功能。(注意:浏览器仅可打开 HMI 页面,请勿打开其他页面,现有快捷键与浏览器切页功能存在冲突。) - 通过按下踏板右键来实现取消采集的功能。
- 点击
-
取消采集后,
机器人数据采集状态区域中的采集状态从采集中变为等待开始,同时运行时间停止计时,采集时间归零。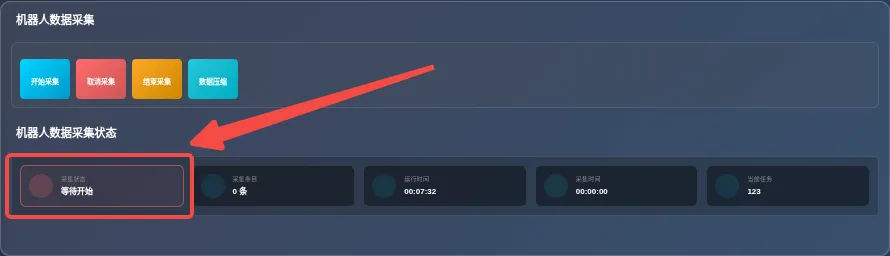
在采集完成后,您需要手动结束采集过程。
-
通过以下三种方法中的任意一种,结束采集数据。
- 点击
结束采集按钮。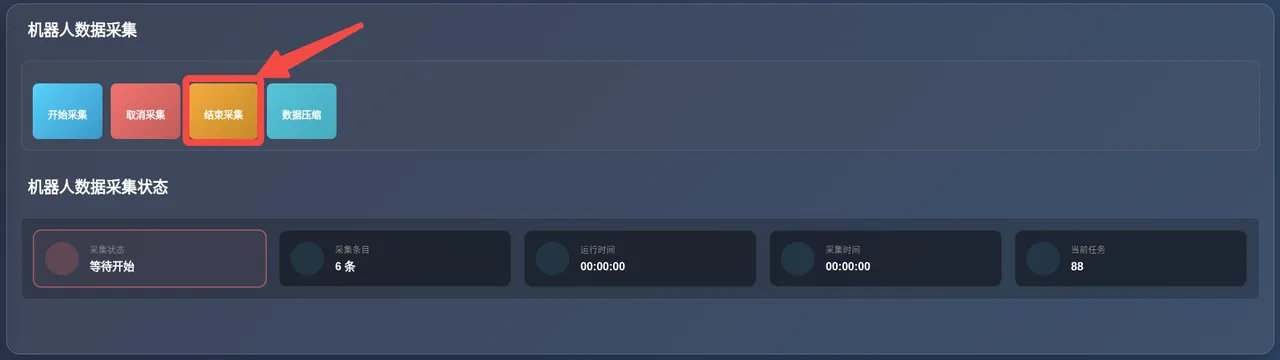
- 通过按下键盘
Ctrl+3快捷键来实现结束采集的功能。(注意:浏览器仅可打开 HMI 页面,请勿打开其他页面,现有快捷键与浏览器切页功能存在冲突。) - 通过按下踏板中键来实现结束采集的功能。
- 点击
-
结束采集后,
机器人数据采集状态区域中的采集状态从采集中变为等待开始,同时运行时间停止计时,采集时间归零,数据落盘一条,采集条目数加 1。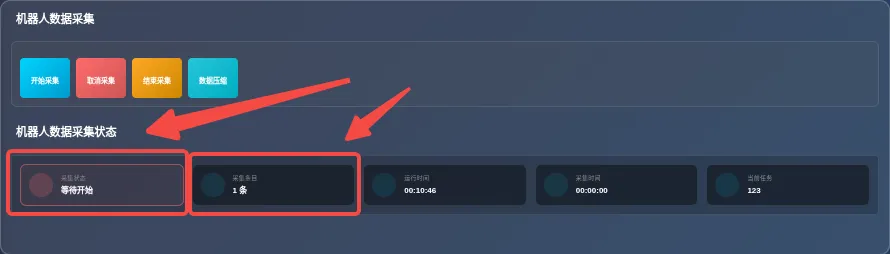
在完成数据采集后,您需要将数据压缩,便于后续上传和使用。在开始以下操作前,请确保至少已完成一次数据采集。
-
点击
数据压缩按钮。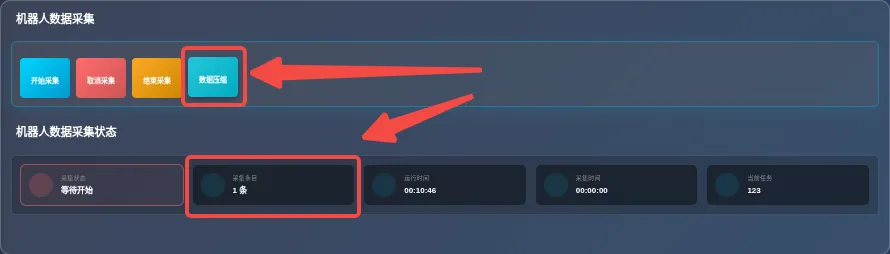
-
在如下弹窗中,输入将要压缩的任务名称,点击
开始压缩按钮。
-
压缩过程如下,等待压缩完成,点击弹窗外空白处,即可关闭弹窗。

在完成数据采集和压缩后,您可以使用 数据上传 功能来上传数据。在开始以下操作前,请确保至少已完成一次数据采集和压缩。
- 点击
数据上传按钮。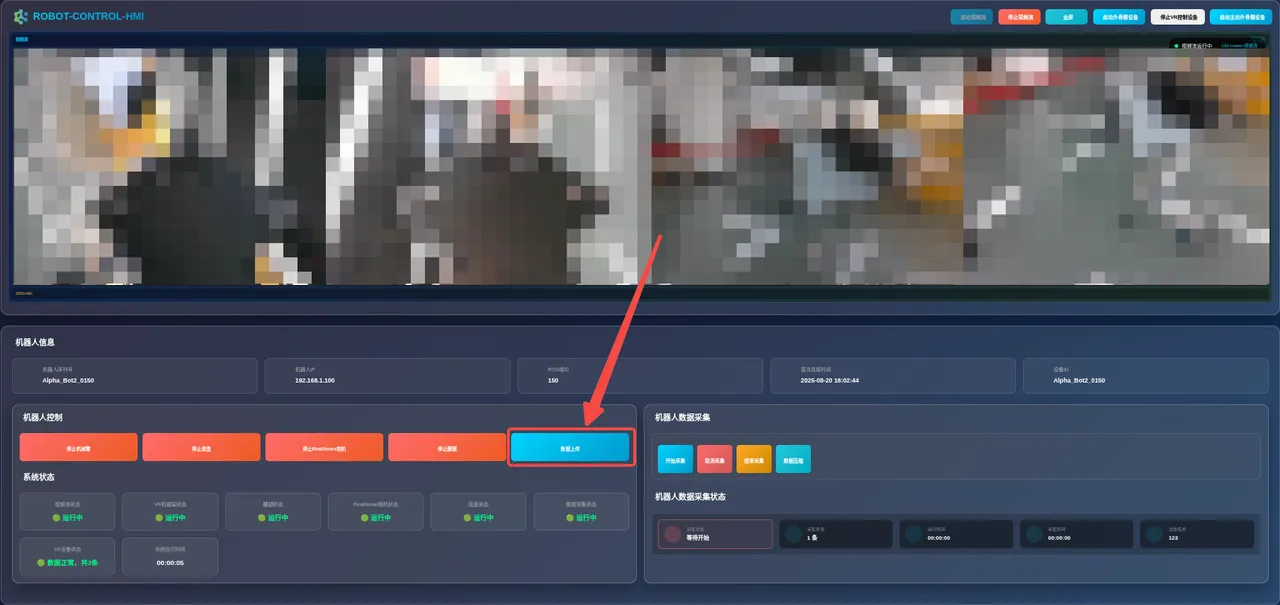
- 在如下弹窗中,请耐心等待数据上传完成,并确认上传的文件数量正确。若需要取消上传,请点击
取消上传按钮。
| 键 | 说明 |
|---|---|
| 中键 | 开始或结束采集 |
| 右键 | 取消采集 |
| 左键 | 标记点位,用于长程任务的分阶段标记,方便数据切分和训练验证。 |